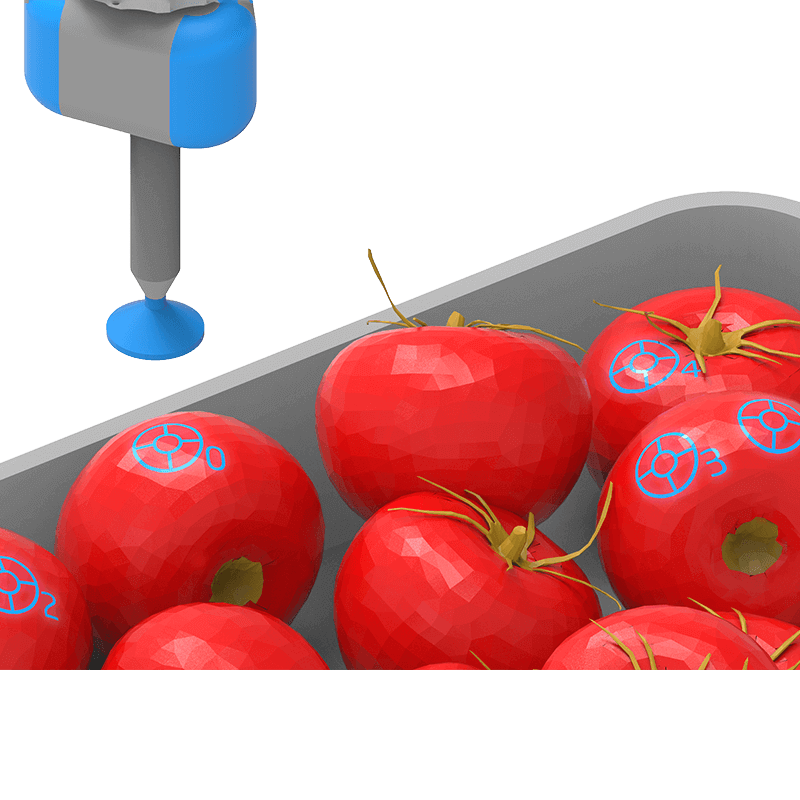
The ItemPick singulation software module is a solution for robotic pick-and-drop applications using suction grippers: It computes surface grasp poses for a suction device on a given object. The user simply defines the size of the suction surface of their gripper in order to set up fully functional applications quickly.
The rc_reason ItemPick module is an optional software component that can be easily activated on-board any smart 3D sensor or IPC from Roboception, and operated through the standard interface: ItemPick computes a configurable number of grasp poses for a suction device on all items identified inside a pre-defined workspace.
Initial identification of load carrier for bin picking
Reliable detection of flat surface(s) on items
Works with static and robot-mounted sensors
On-board data processing on the rc_visard and rc_visard NG: No external hardware required
Out-of-the-box: Easy to install and operate
Details about the ItemPick Singulation Software
A quality-based grasp order, which can easily be modified by the user, is proposed. Each suggested grasp includes a quality value related to the surface available for grasping. As the size of the selected suction device can be specified individually, the ItemPick singulation software can be used with any common suction gripper. It works with objects of any kind.
Workspace definition is performed either automatically (e.g. by detecting a bin), or manually (by defining an area of interest). Using the sensor’s on-board hand-eye calibration component, which avoids additional transformation steps between sensor and robot, is an additional option. Java sample programs ease integration with robot controllers.
ItemPick applications can be optimized by equipping the rc_visard with a rc_randomdot projector and corresponding IOControl Module. This enhancement is recommended particularly for difficult objects or workspaces. Users can find more information in our tutorials.
Additional Information for the ItemPick Singulation Software
Robotic system equipped with suction device Any compatible 3D stereo sensor (plus rc_cube as needed) rc_randomdot Projector and IOControl Module optional
You would like to find out whether our portfolio is suitable for your robotic application? Simply request a feasibility study free of charge, and get a live demo of our products.
Would you like to try out one of our sensors and software solutions? Our Try-&-Buy-option gives you the chance to test our products before you decide, and to be sure you make the right choice for your application.


_800x800")
