
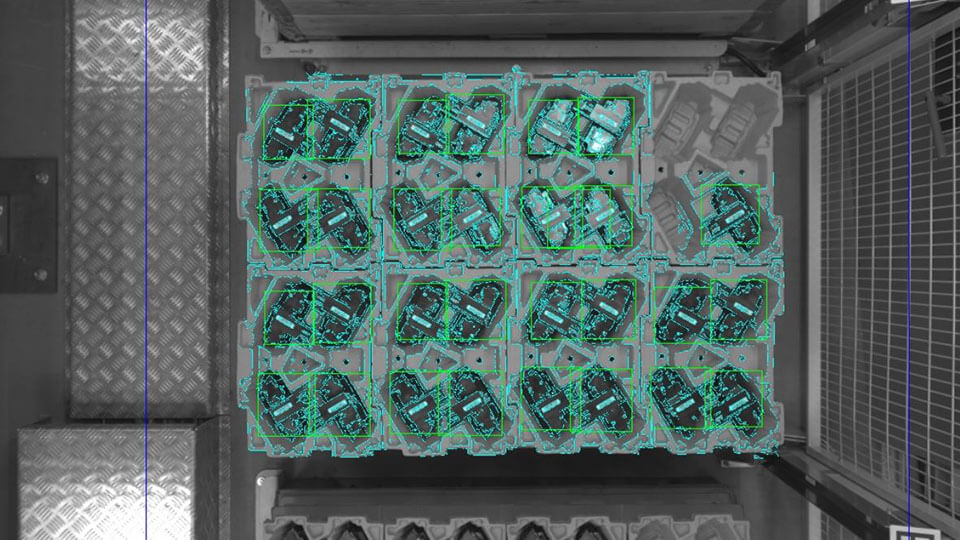
3D Robot Vision Helps Reduce Risk and Increase Production Volume
How the vision-based automation of loading and unloading massive aluminum casts reduces accident risks and leads to ~37% increased production volume

How the vision-based automation of loading and unloading massive aluminum casts reduces accident risks and leads to ~37% increased production volume

How a once tedious manual assembly process was reliably automated while minimizing the required floor space.

How a high-performance robot vision system solved the pick-and-place performance issues of an automated kitting cell

