Schnelle und einfache Erkennung von unbekannten Objekten
Die rc_reason ItemPick Software für Kommissionierung und Vereinzelung ist eine Lösung für robotergestützte Pick-and-Drop-Anwendungen mit Sauggreifern: Sie berechnet Greifposen für einen Sauggreifer auf einem beliebigen Objekt. Der Anwender definiert lediglich die Größe der Saugfläche seines Greifers und kann dadurch innerhalb kürzester Zeit voll funktionsfähige Applikationen einrichten und in Betrieb nehmen.
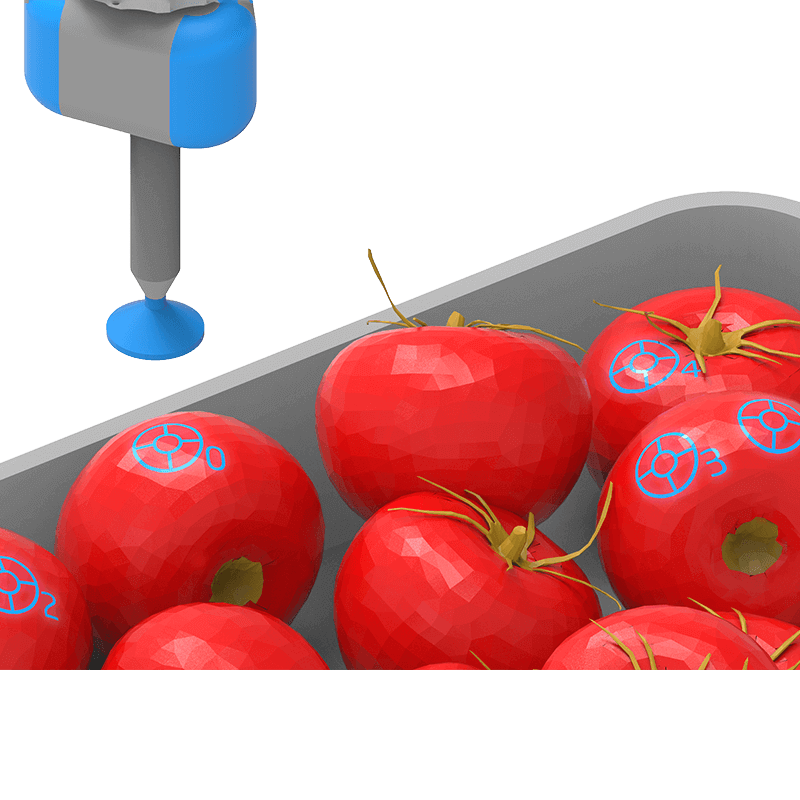
Das rc_reason ItemPick-Modul ist eine optionale Softwarekomponente, die einfach an Bord jedes intelligenten 3D-Sensors oder IPC von Roboception aktiviert und über die Standardschnittstelle bedient werden kann: ItemPick berechnet eine konfigurierbare Anzahl von Greifposen für eine Saugvorrichtung auf allen identifizierten Gegenständen innerhalb eines vordefinierten Arbeitsbereichs.
Initiale Identifikation des Ladungsträgers für die Behälterkommissionierung
Zuverlässige Erkennung von flachen Oberflächen auf (auch unbekannten) Gegenständen
Funktioniert mit statisch oder am Roboterarm montierten Sensoren
Integrierte Datenverarbeitung auf dem rc_visard oder rc_visard NG: Keine externe Hardware erforderlich
Sofort einsatzbereit: Einfach zu installieren und zu bedienen
Details zur ItemPick Software für Kommissionierung
Es wird eine qualitätsbasierte Greifreihenfolge vorgeschlagen, die vom Bediener leicht geändert werden kann. Jeder vorgeschlagene Griff enthält einen Qualitätswert, der sich auf die zum Greifen verfügbare Oberfläche bezieht. Da die Größe der ausgewählten Saugvorrichtung individuell festgelegt werden kann, kann die ItemPick Vereinzelungssoftware mit jedem gängigen Sauggreifer verwendet werden. Sie funktioniert bei allen Arten von Objekten.
Die Definition des Arbeitsbereichs erfolgt entweder automatisch (z. B. durch Erkennung eines Behälters) oder manuell (durch Definition des Interessenbereiches). Die Verwendung der integrierten Hand-Augen-Kalibrierungskomponente des Sensors, die zusätzliche Transformationsschritte zwischen Sensor und Roboter vermeidet, ist eine zusätzliche Option. Java-Beispielprogramme erleichtern die Integration mit Robotersteuerungen.
ItemPick-Anwendungen können optimiert werden, indem der rc_visard mit einem rc_randomdot-Projektor und einem entsprechenden IOControl-Modul ausgestattet wird. Diese Erweiterung ist besonders bei schwierigen Objekten oder Arbeitsbereichen zu empfehlen. Weitere Informationen finden Sie in unseren Tutorials.
Zusätzliche Informationen über die ItemPick Software für Kommissionierung
Möchten Sie herausfinden, ob unser Portfolio für Ihre Robotikanwendung geeignet ist? Vereinbaren Sie einfach eine kostenlose Machbarkeitsstudie und lassen Sie sich unsere Produkte live vorführen.
Möchten Sie unsere Sensoren und Softwarelösungen ausprobieren? Mit unserer Try-&-Buy-Option haben Sie die Möglichkeit, ein Produkt zu testen, bevor Sie eine finale Entscheidung treffen.


_800x800")
