{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

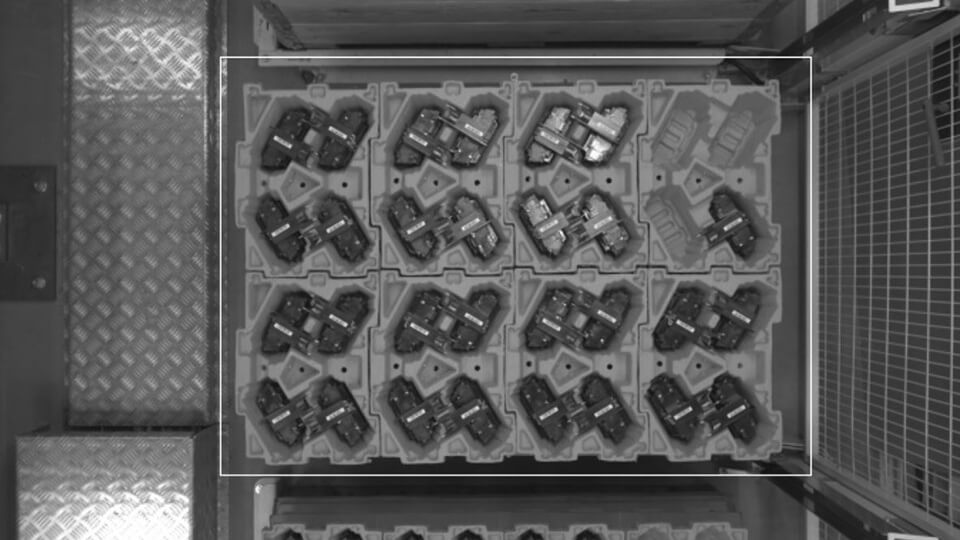
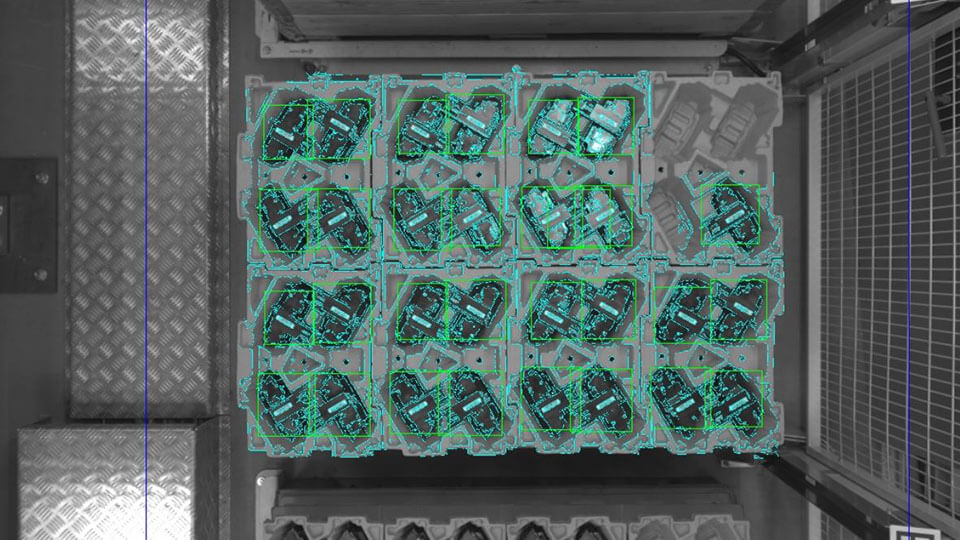
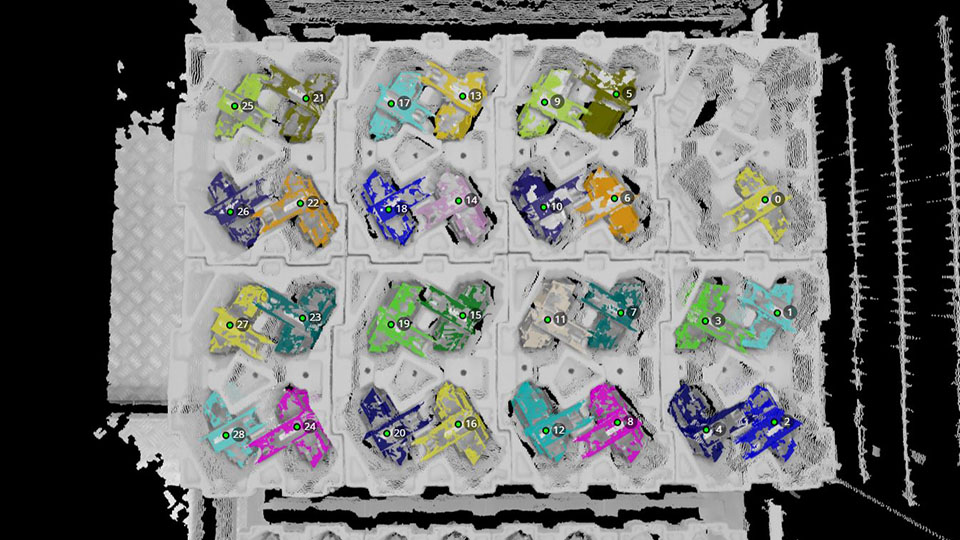
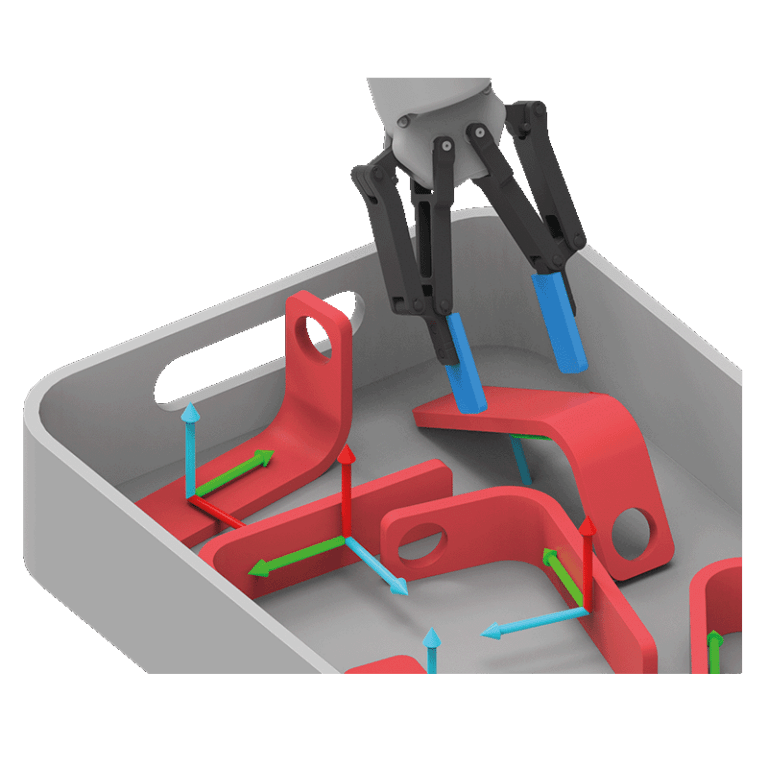
3D Robot Vision Helps Reduce Risk and Increase Production Volume
How the vision-based automation of loading and unloading massive aluminum casts reduces accident risks and leads to ~37% increased production volume






How the vision-based automation of loading and unloading massive aluminum casts reduces accident risks and leads to ~37% increased production volume

How a once tedious manual assembly process was reliably automated while minimizing the required floor space.

How adding a robot vision component enables precise pick-and-place for automated machine tending with 100+ different parts

How adding a robot vision system led to increased robustness and 50% reduced cycle time in refractory bricks production processes
How the vision-based automation of loading and unloading massive aluminum casts reduces accident risks and leads to ~37% increased production volume