
Robot Vision System Improves Industrial Automation
How adding a robot vision system led to increased robustness and 50% reduced cycle time in refractory bricks production processes
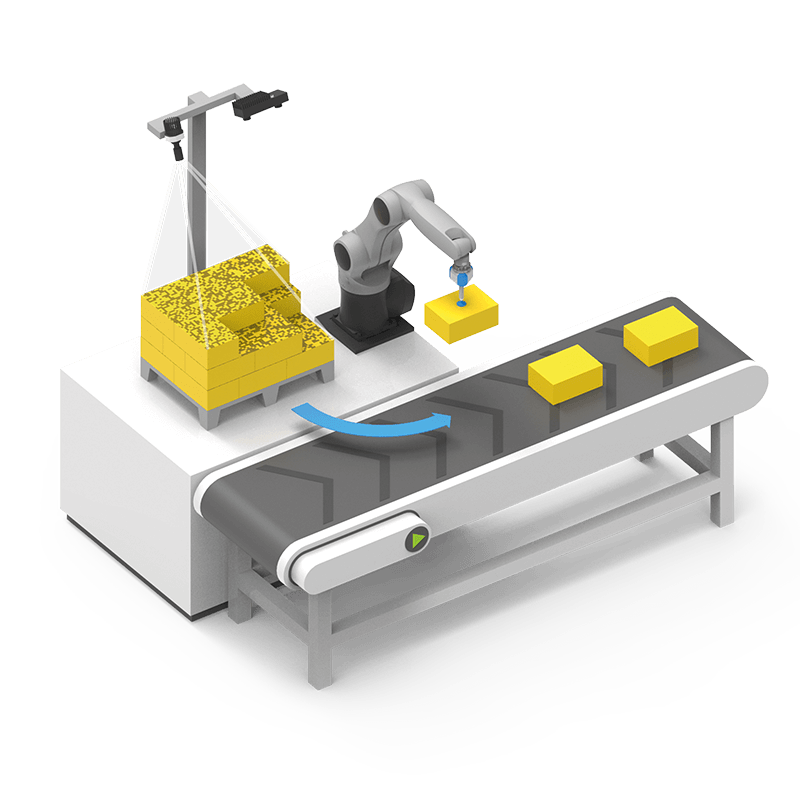
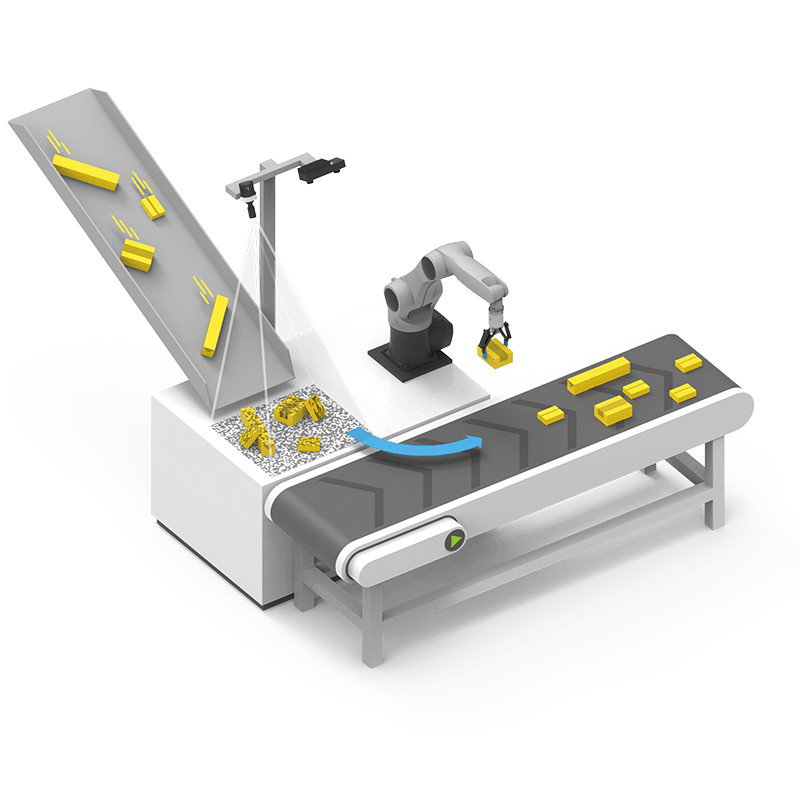


How adding a robot vision system led to increased robustness and 50% reduced cycle time in refractory bricks production processes


