AI-Based Grasping and Oriented Placement of Unknown Objects
The rc_reason ItemPickAI software enables the efficient separation and oriented placement of unknown or so-called ‘unseen’ objects – i.e. objects that the system has not explicitly learned by teaching models or seen in training data beforehand.
This AI-based solution for robotic pick-and-place applications with suction grippers calculates aligned grasp poses for a suction gripper on unknown, deformable objects of a certain category. These objects can come in chaotic boxes or load carriers, and both mixed and unmixed configurations are possible.
During commissioning, only the object category (e.g. ‘bag’) and the size of the gripper’s suction cup need to be selected. These parameters can be flexibly adapted to new conditions at any time. This means that pick-and-place applications such as picking and (de)palletizing can be implemented efficiently within a very short time frame, even without expert knowledge in the field of AI or image processing.
The rc_reason ItemPickAI module runs offboard with any 3D sensor via Roboception’s rc_cube and is configured and read out via the standard interface. ItemPickAI calculates a configurable number of grasp poses for a suction device on all identified objects within a predefined workspace.
Initial identification of the load carrier for definition of container
Reliable segmentation even of deformable objects in an object category, and calculation of oriented grasp poses for an oriented placement
Currently supported object categories: ‘bag’ or ‘consumer goods’, with more to come
Works with static sensors or sensors mounted on the robot arm
Ready for immediate use: Easy to install and operate
Available Object Categories (with more to come)
Model Type: Consumer Goods
The model type ‘consumer goods’ is is designed for handling general consumer products, typically in warehouse environments. It enables detection and picking for a wide range of packaged everyday items such as packaged food, beverages, toiletries, cleaning supplies, packaged electronic goods, toys,… and much more.
Model Type: Sheet Metal
The model type ‘sheet metal’ enables users to easily grasp and place flat parts made of metal as well as other material (e.g. typically plastic). The software delivers centered grasp points on previously unknown objects from mixed or unmixed scenarios, and enables an oriented placing based on the object’s bounding boxes.
Model Type: Bags
The model type ‘bags’ is optimized for the reliable detection and computation of grasp points on bags of all kind with various volumes and fill levels, e.g. bag packaging, small packages, shipping bags, paper bags, sacks,… and will enable grasping despite the fact that these bags may be deformable and shifting in shape.
Details on the ItemPickAI Software for AI-Based Pick-and-Place
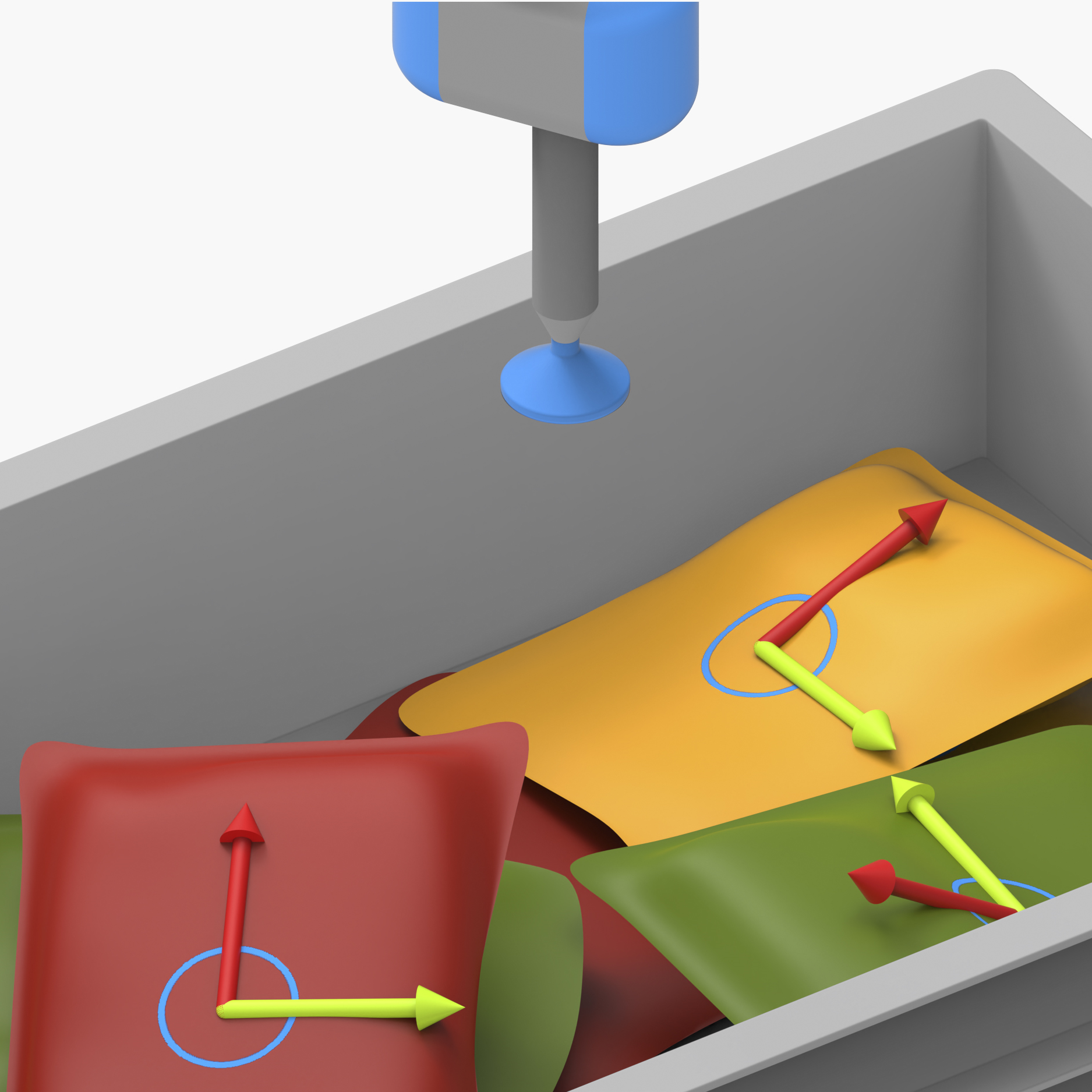
Robust segmentation of objects with uneven surfaces and varying, deformable content is made possible by the use of neural networks. This ensures that a grasp point is always placed in the center of the segmented objects. In addition, the orientation of the object is determined to enable an oriented placement.
As the size of the selected suction device can be defined individually, the ItemPickAI software can be used with any standard suction gripper.
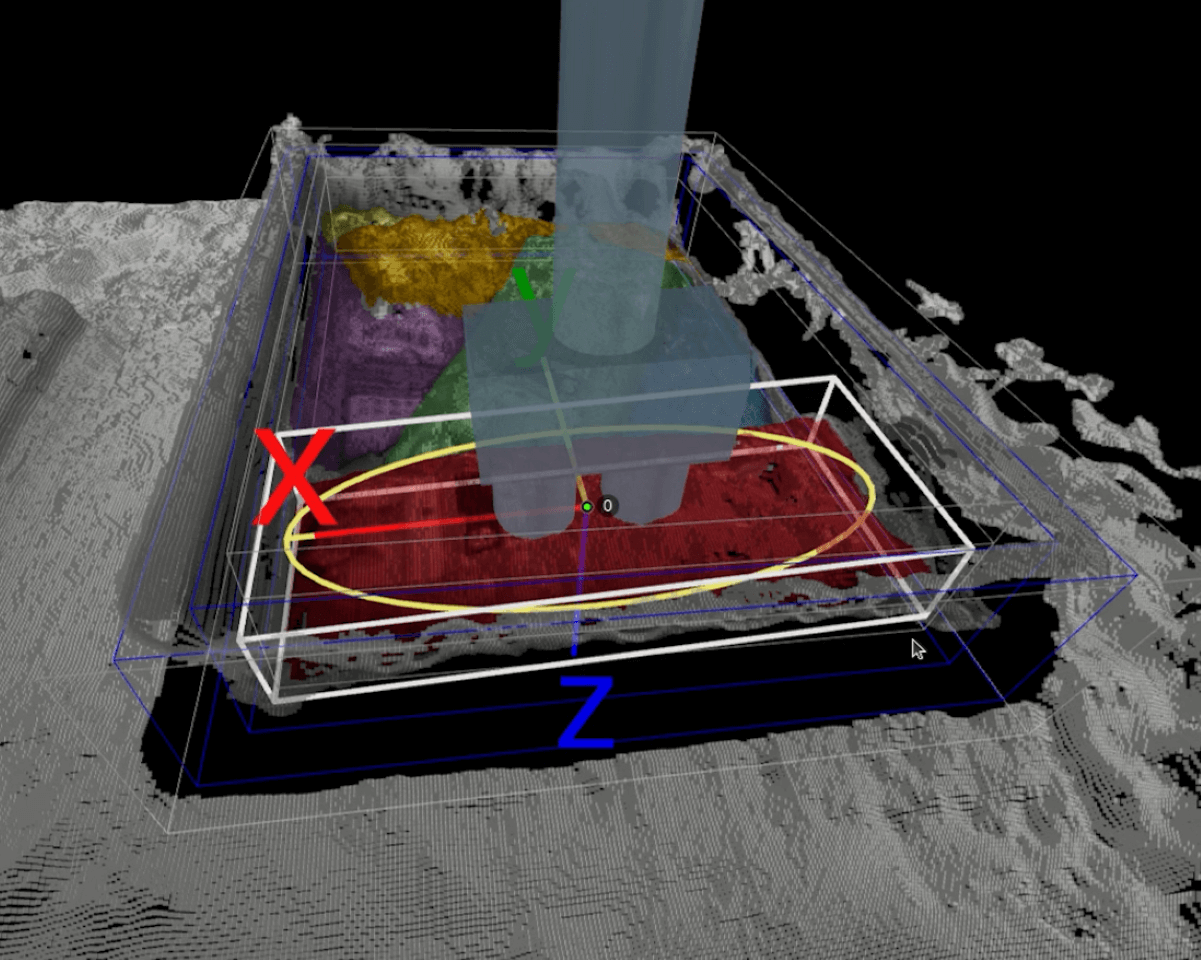
The working area is defined either automatically (e.g. by recognizing a container) or manually (by defining the area of interest). Sample programs facilitate integration with robot controllers.
For ItemPickAI applications, the use of the rc_randomdot projector is recommended, especially when load carriers need to be detected within the pick process.
Additional information about the ItemPickAI Software for AI-Based Pick-and-Place
You would like to find out whether our portfolio is suitable for your robotic application? Simply request a feasibility study free of charge, and get a live demo of our products.
Would you like to try out one of our sensors and software solutions? Our Try-&-Buy-option gives you the chance to test our products before you decide, and to be sure you make the right choice for your application.




_800x800")
