{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

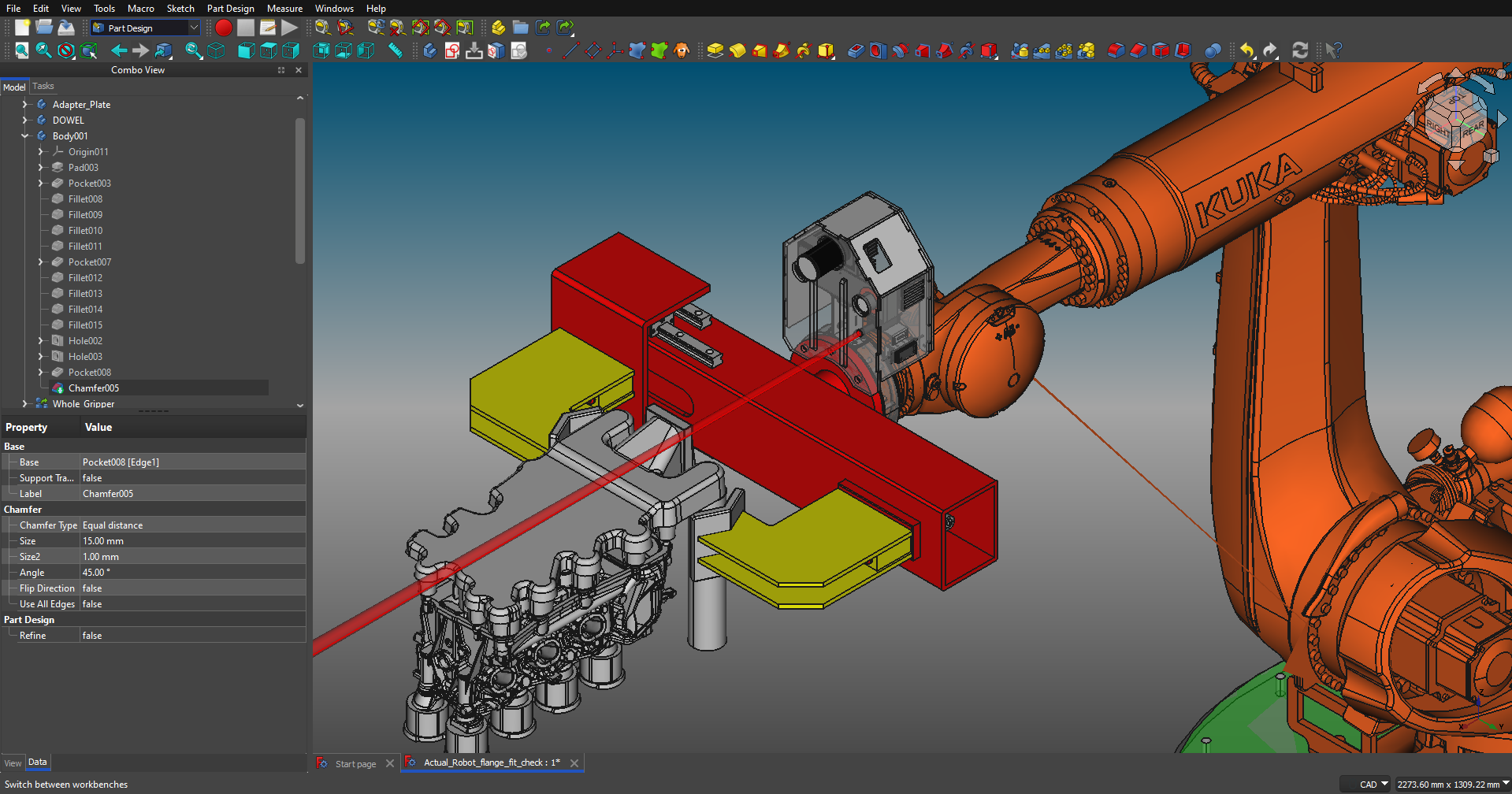
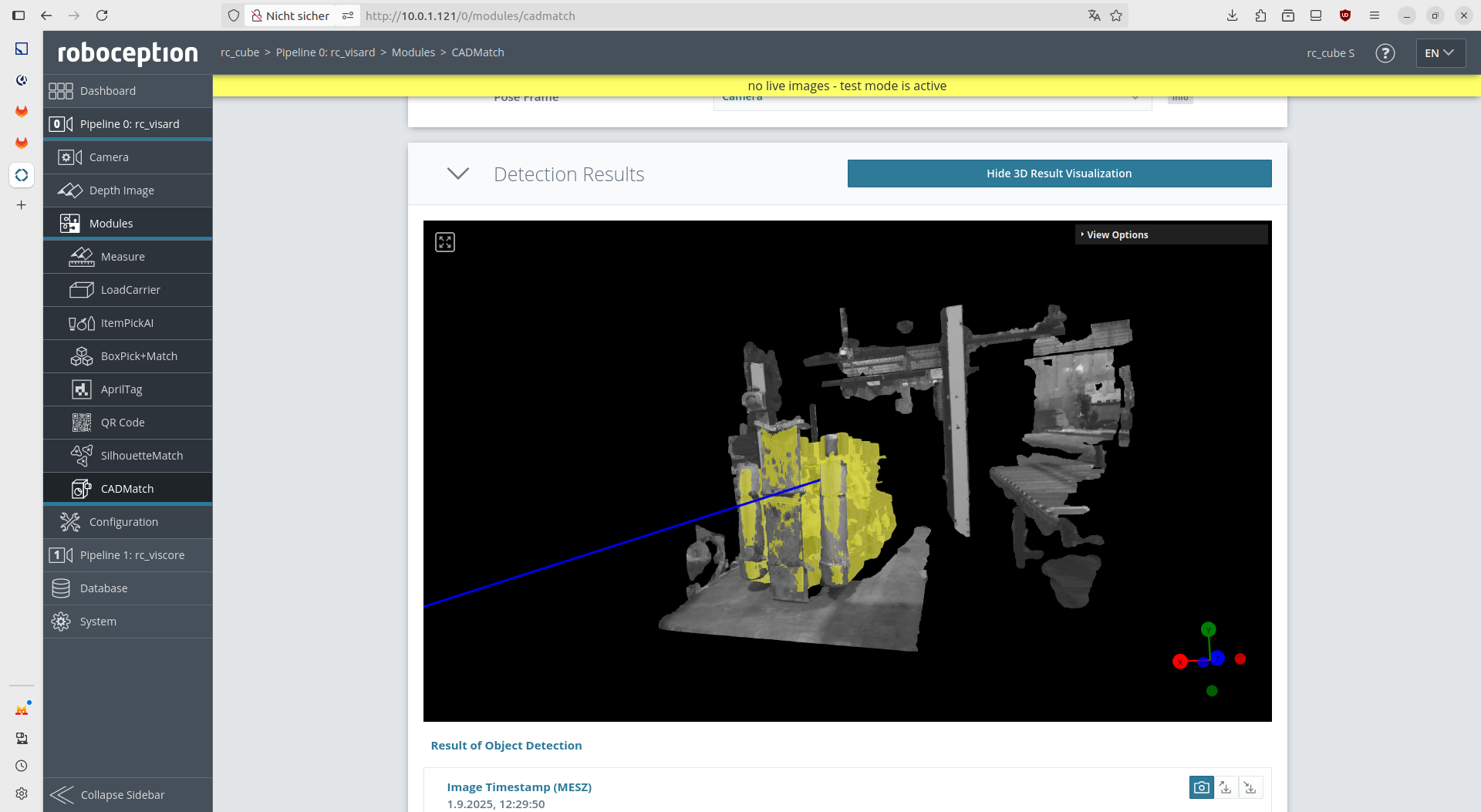
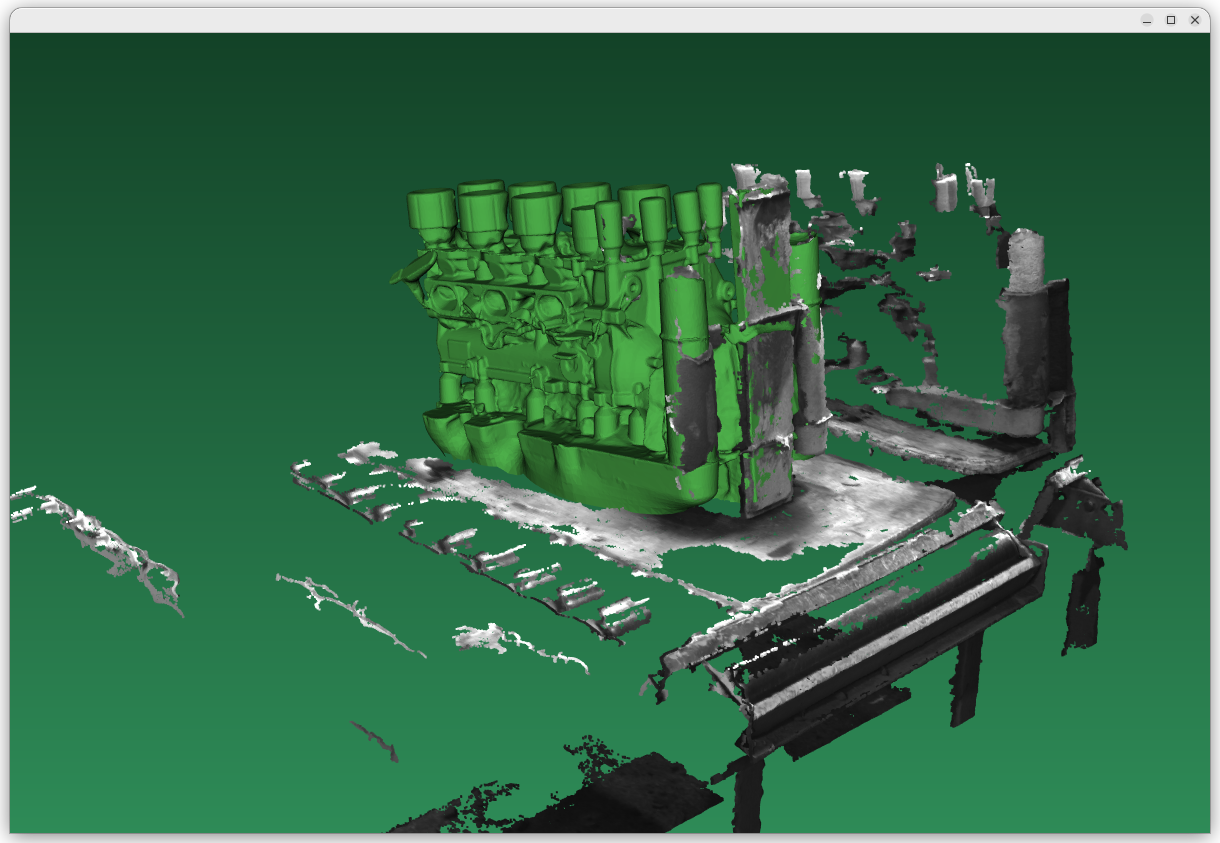
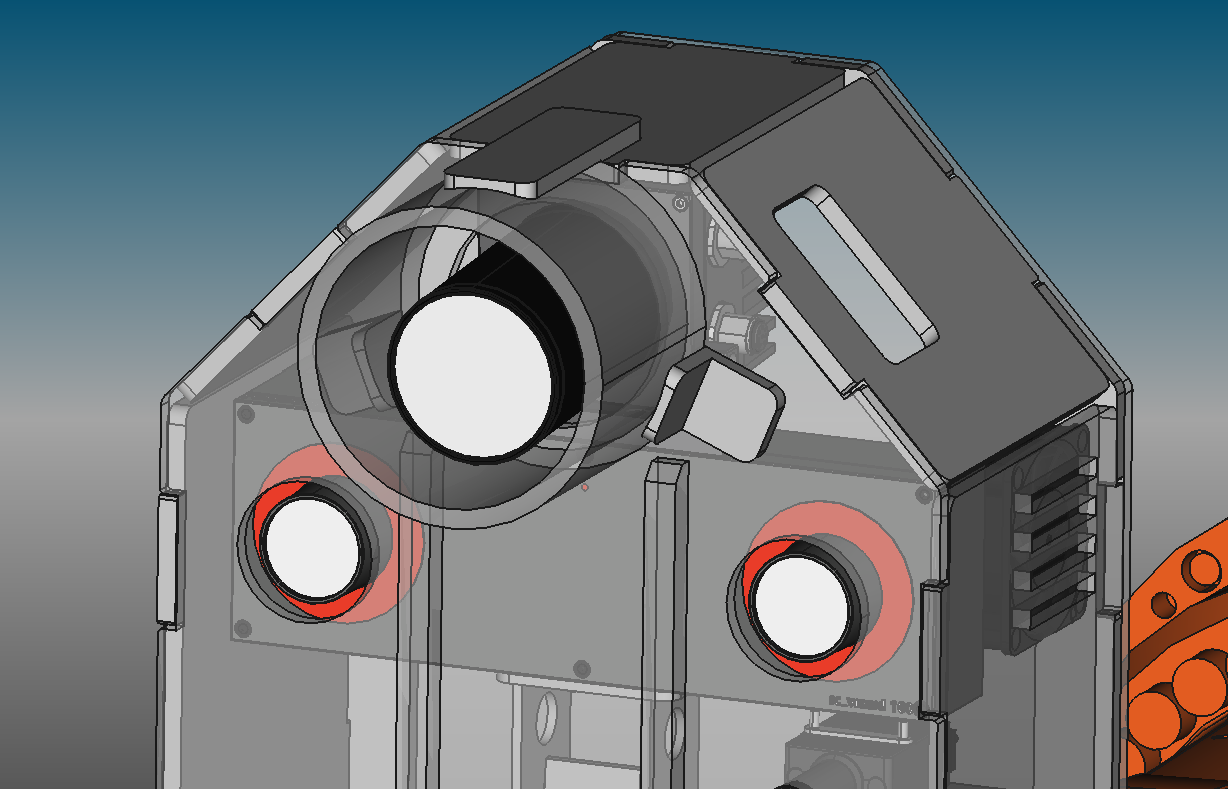
3D Camera Replaces Manual Picking and Saves Space
How a once tedious manual assembly process was reliably automated while minimizing the required floor space.






How a once tedious manual assembly process was reliably automated while minimizing the required floor space.

How a high-performance robot vision system solved the pick-and-place performance issues of an automated kitting cell

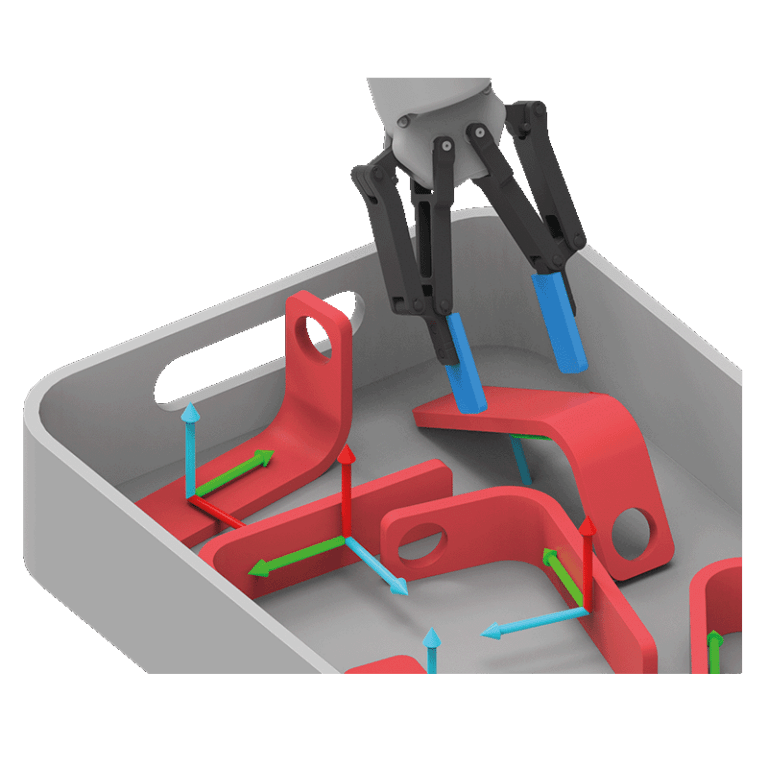
How adding a robot vision component enables precise pick-and-place for automated machine tending with 100+ different parts

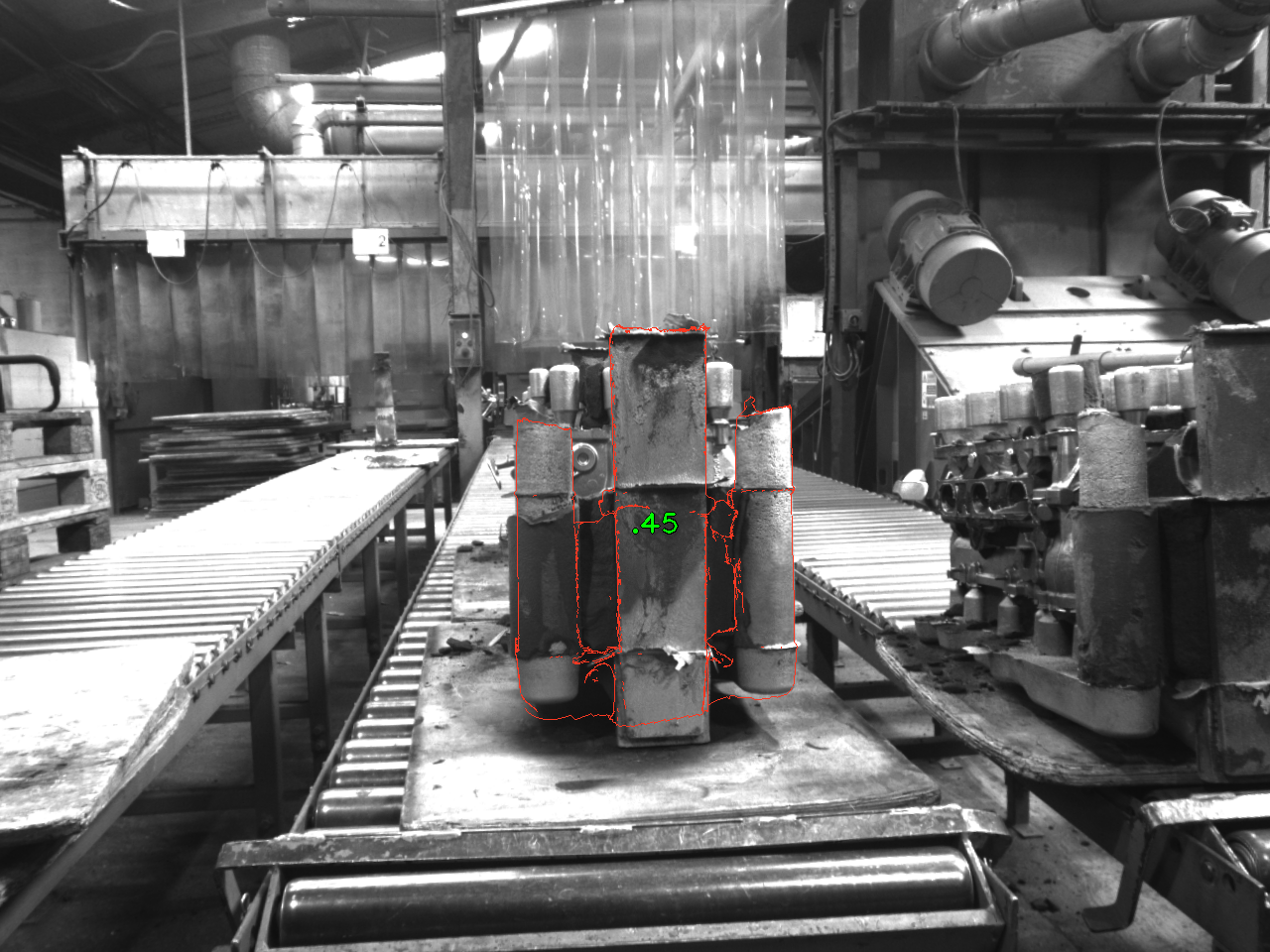
How adding a robot vision system led to increased robustness and 50% reduced cycle time in refractory bricks production processes
How a once tedious manual assembly process was reliably automated while minimizing the required floor space.