
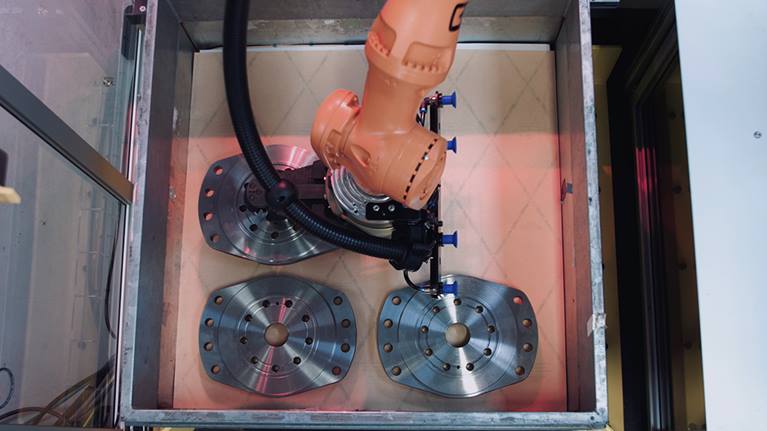
Robot Vision for Machine Tending – with No Manual Intervention
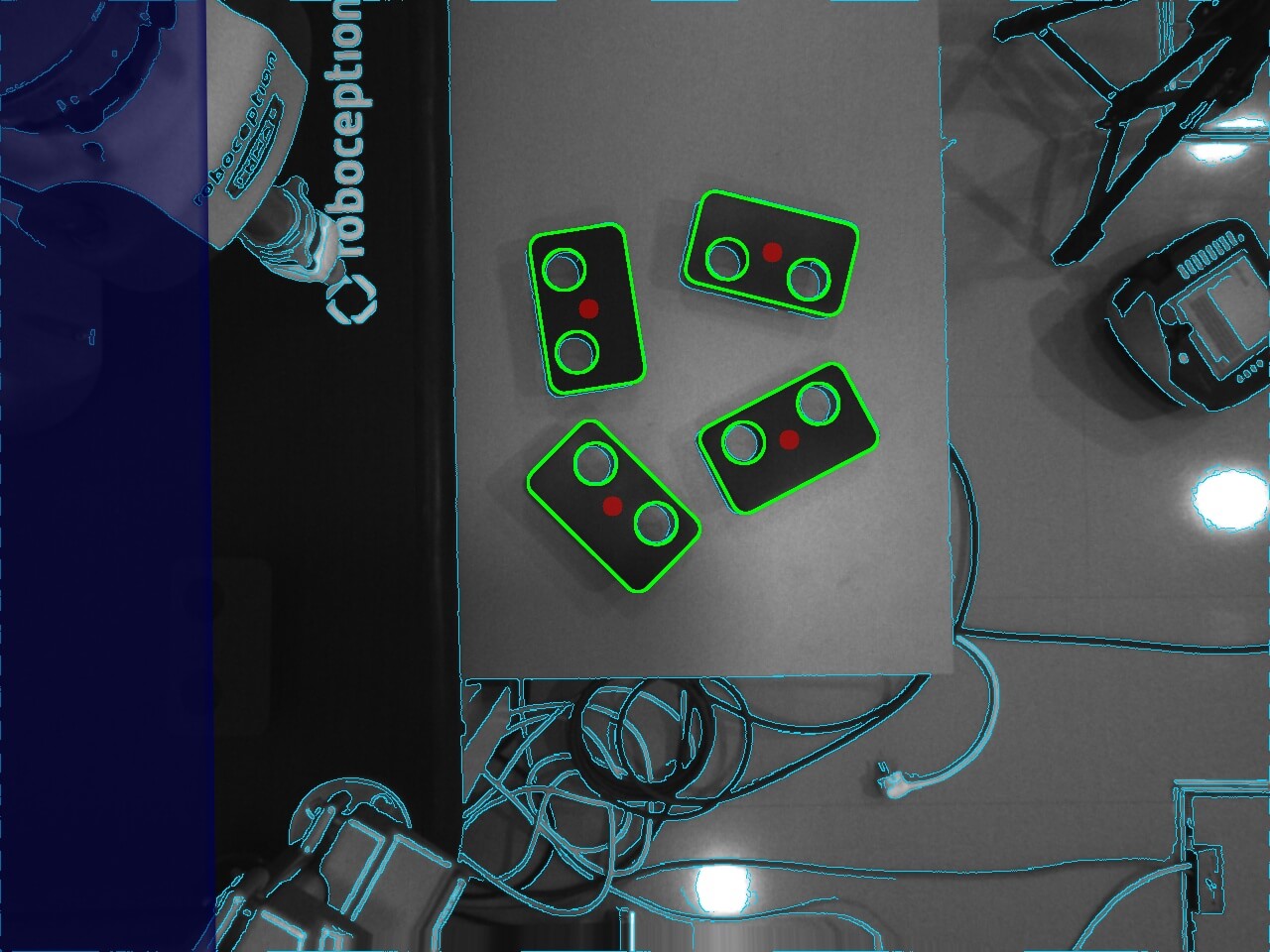
How adding a robot vision component enables precise pick-and-place for automated machine tending with 100+ different parts
How adding a robot vision component enables precise pick-and-place for automated machine tending with 100+ different parts


How adding a robot vision component enables precise pick-and-place for automated machine tending with 100+ different parts

_800x800")
