Roboception has just released the rc_reason BoxPick Module, which provides a solution for robotic pick-and-place applications such as de-/palletizing and sorting of packets.
Equipped with the BoxPick Module, the rc_visard detects rectangular surfaces over pre-defined size ranges and optionally computes potential grasp points. It allows the detection of the position, the orientation and the size of the objects and enables the robot to place the objects in a defined position.
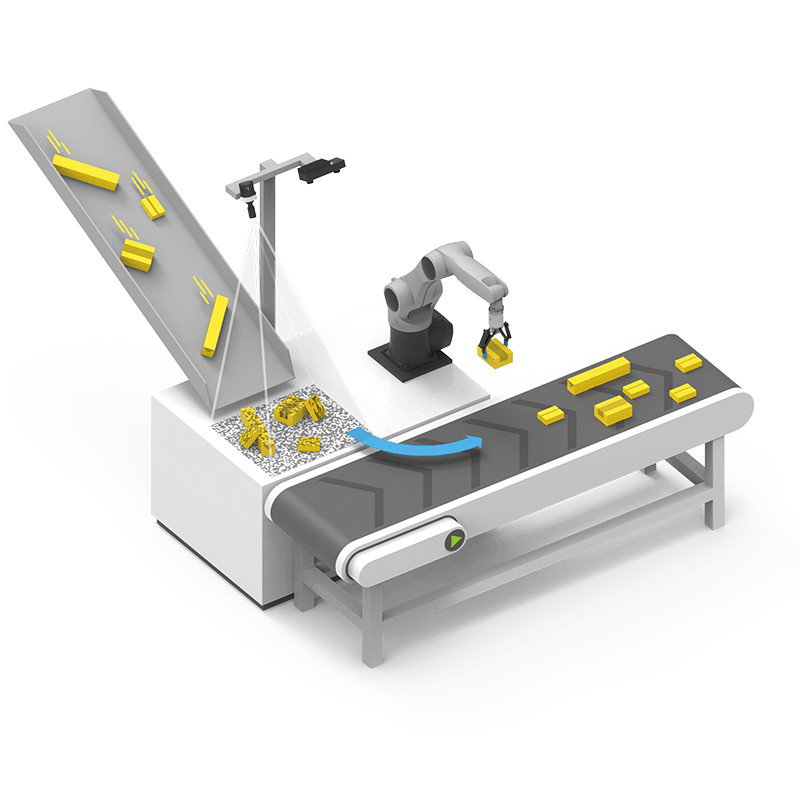
The BoxPick Module enables robots to pick unsorted and unordered packets out of a bin and palletize these items in a defined, oriented way. It can also be used for de-palletizing packets to a conveyor belt, e.g. for cross-belt sorters.