Roboception at HMI 2017
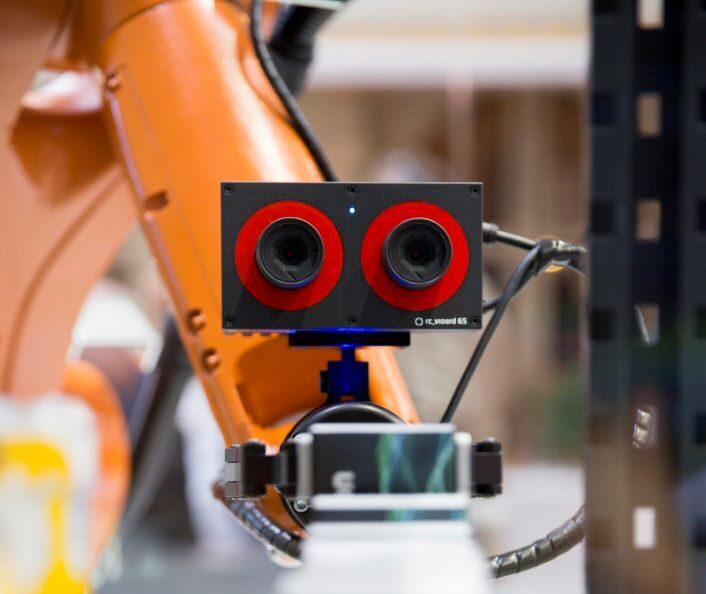
Thanks to Roboception’s newly developed 3D stereo sensor rc_visard, robots can now see in three dimensions like humans, which significantly increases their flexibility and usability.
Roboception presents its new 3D stereo sensor for the first time at the Hannover Messe in hall 17, booth G23. The new stereo-based sensor not only delivers point clouds and depth images in real time, but can also easily find its way around any room at any time thanks to integrated position estimation from image and inertial data.
Robots typically use a laser scanner to see. While this is fast and accurate, it only works in two dimensions. In addition, the environment has to be specially marked with landmarks and other features for the robot to orient and move safely. This generates enormous costs and reduces the flexibility of the application.
Roboception has developed a new system with its new 3D stereo sensor.
The new sensor enables the robot to visually perceive its environment. The two cameras provide true 3D vision, allowing the robot to grasp objects with maximum flexibility without absolute measurement. It generates and interprets position-based data in real time, allowing it to navigate easily in unfamiliar environments. All processing is performed on-board, allowing the sensor to be used in mobile systems without additional infrastructure.
A further advantage is that the 3D sensor can also be configured by a non-expert using a web browser, which makes it easy to integrate it into existing machine vision solutions. Of course, the system also has a standardized GenICam interface. The software can also be used immediately with other hardware configurations, allowing a wide range of applications in almost any field.
Roboception also offers an extensive program library for individual compilation of possible applications. “The intuitive operation and configuration combined with the attractive price makes the use of image processing possible for everyone,” says Dr. Michael Suppa, CEO of Roboception.
The sensor is initially available in two housing variants, both with color reproduction and monochrome, and can be used for mounting on the robot or as an external sensor.
- veröffentlicht von: Mareike Suppa
- Kategorie: Events, Events (past), General