
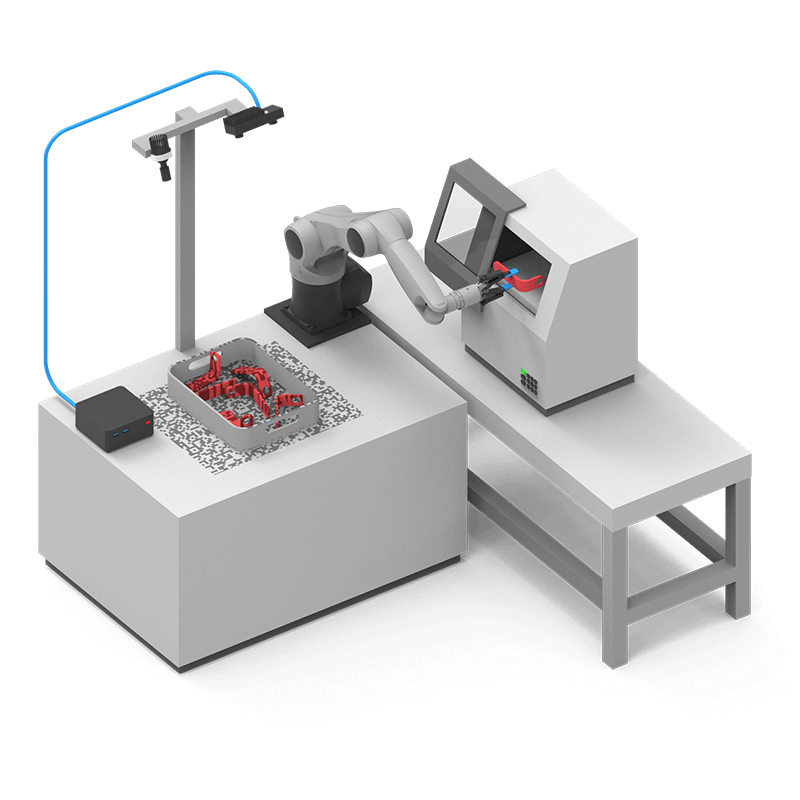
Robot Vision Optimizes Automated Kitting Cell
How a high-performance robot vision system solved the pick-and-place performance issues of an automated kitting cell

_800x800")

How a high-performance robot vision system solved the pick-and-place performance issues of an automated kitting cell

How adding a robot vision component enables precise pick-and-place for automated machine tending with 100+ different parts

How adding a robot vision system led to increased robustness and 50% reduced cycle time in refractory bricks production processes

How RG Technologies added automatic contour detection as a key USP into their software solution for leather processing
How a high-performance robot vision system solved the pick-and-place performance issues of an automated kitting cell