The experts in our technical support team are available via email and phone
Our dedicated support team is available to provide timely and expert guidance to ensure a smooth integration process and optimal performance. We prioritize your success and are committed to helping you overcome any challenges. Please do not hesitate to get in touch in case of questions.
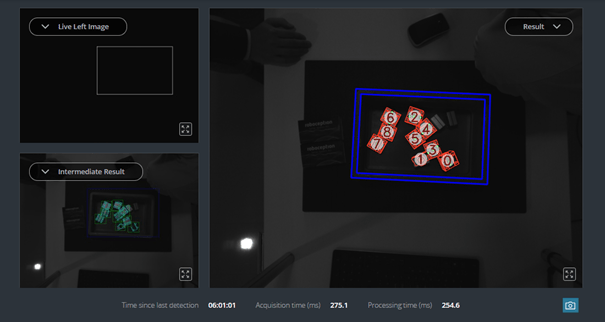
By using the snapshot-function in our WebGUI, we can support you remotely without having access to your installation. If you have your system already up and running, please send snapshots of your results in question with your support enquiry.
You can generate the snapshots by clicking the button with the camera symbol on the lower right corner of the image on the respective page in the WebGUI.
Our extensive online documentation provides detailed information from commissioning to interface configuration. Just browse the menu step by step or search the docs specifically for your topic of interest using the search bar.
Depending on your hardware in use, you may browse the following documentations also for detailed information about your software module (see relevant chapters in rc_visard and rc_cube documentation):
rc_visard: https://doc.rc-visard.com/latest/en/index.html
rc_cube: https://doc.rc-cube.com/latest/en/index.html
rc_viscore: https://doc.rc-viscore.com/en/index.html
rc_randomdot: https://doc.rc-randomdot.com/en/index.html
For more detailed step-by-step guides on various topics, please also check our tutorials:
Depending on the type of application and the mechanical requirements of the setup, the mechanical installation of the sensor is very individual. We are happy to advise you on the correct mounting, the ideal viewing distance and other factors to ensure the best possible installation. In addition, our tutorials and manuals provide detailed instructions on how to set up each of our sensors.
The WebGUI of an rc_visard, rc_visard NG or rc_cube is easily accessible:
Parameters like the frame rate, exposure time and gain factor determine when and how images are captured. They have a huge impact on all image processing modules. Additionally, the quality of the depth image can often be improved by tuning stereo matching parameters. Please consult our tutorial “Tuning of image parameters” for detailed information on how to optimize your image settings.
You would like to find out whether our portfolio is suitable for your robotic application? Simply request a feasibility study free of charge, and get a live demo of our products.
Would you like to try out one of our sensors and software solutions? Our Try-&-Buy-option gives you the chance to test our products before you decide, and to be sure you make the right choice for your application.