

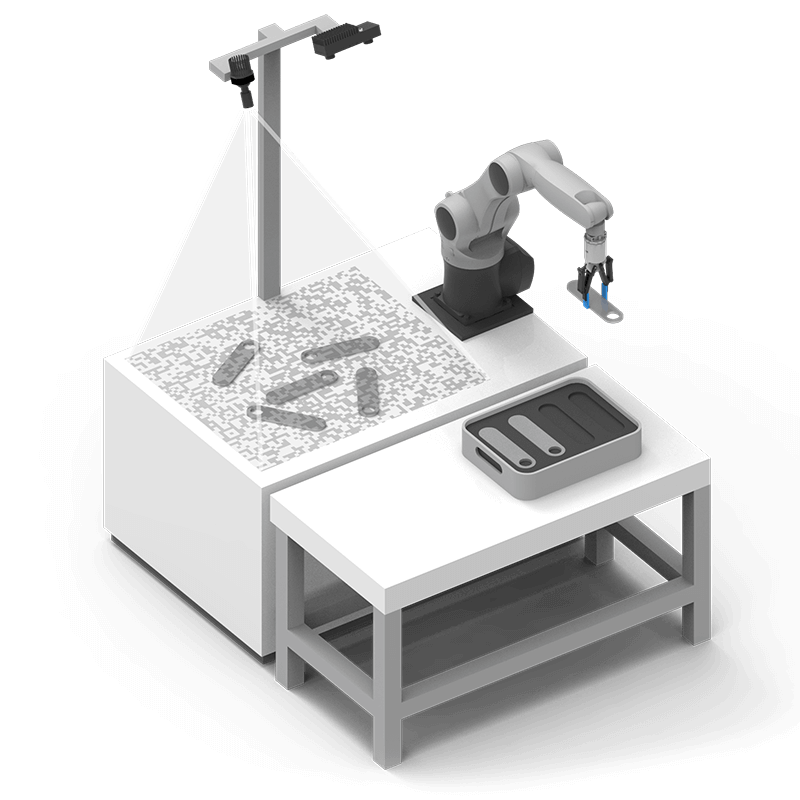
The flexible vision platform rc_visard NG opens up new possibilities for robotics integrators and end users to take full advantage of image processing solutions in their automation endeavors. The smart 3D stereo sensor allows the easy integration of proven software solutions with application-specific additions. This ‘next generation’ of the rc_visard is powered by today’s most advanced embedded AI solution, the NVIDIA® Jetson Orin™ series.
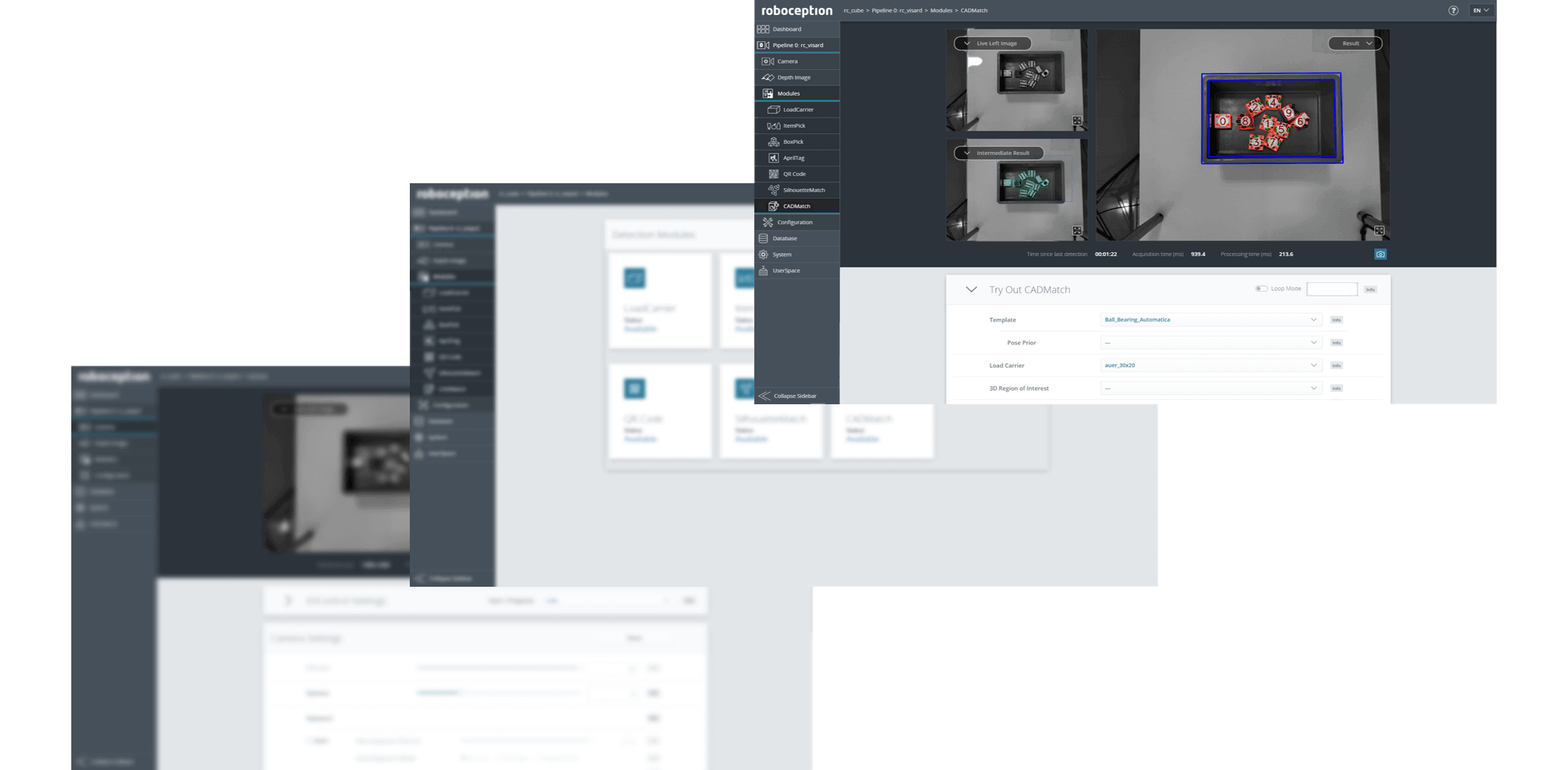
rc_visard NG users do not need any expertise or prior experience in machine vision: Thanks to its user-friendly web interface, the rc_visard NG can be used intuitively and the installation effort is reduced to a minimum.
The rc_visard NG can also be connected and configured via Rest-API, ROS, OPC UA and GenICam.
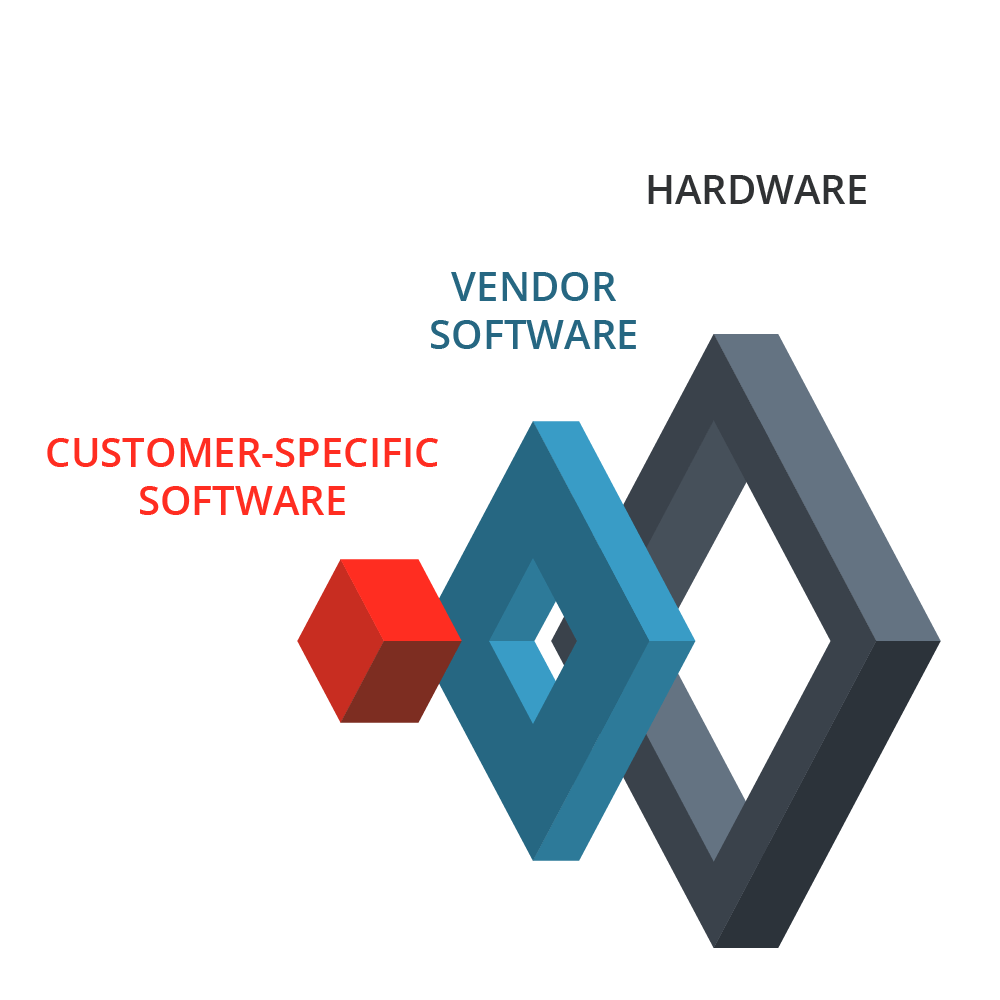
Platforms for robot vision are based on modular concepts, building blocks and platform technologies to provide users with better integration processes and ultimately more stable and flexible solutions. Based on the three levels of (1) hardware, (2) vendor software and (3) customer-specific software, users can design tailored vision solutions for functional applications.
As a highly flexible robot vision platform, the rc_visard NG is the first to unite all three levels on one sensor. Without additional hardware or external computing power, the rc_visard NG delivers powerful robot vision right on the edge in one single device.
The rc_reason suite of software modules is an advanced AppliedAI solution designed for robotic applications:
Users select the plug-and-produce software module that best fits their individual needs, and with just a few mouse clicks, the rc_visard NG provides task-relevant information such as grasp points. Any additional software elements can be included via the platform’s UserSpace.
The UserSpace feature allows users to deploy custom software directly on Roboception’s hardware through Docker containers. The UserSpace is particularly useful for collision-free motion planning, Industry 4.0 applications, vision pipelines, or application programs – all while preventing users from having to purchase additional hardware to run those individual software tools.
REST-API and gRPC interfaces can also be used within the UserSpace to obtain grasp points and image data, giving access to all activated rc_reason modules and connected sensors.
| GPU/CPU | Nvidia® Jetson Orin™ Nano 8 GB |
| Base distance | 160 mm |
| Focal length (lenses) | 6 mm |
| Image resolution | 1440 x 1080 Pixel (1.6 MPixel) |
| Field of view | Horizontal: 43°, vertical: 33° |
| Depth measurement range* | 0.5 m – 3.0 m |
| Workspace | 0.5 m distance -> 0.24 m x 0.30 m 1.0 m distance -> 0.64 m x 0.60 m 2.0 m distance -> 1.44 m x 1.20 m 3.0 m distance -> 2.24 m x 1.80 m |
| Cooling | Passive |
| Size (LxHxW in mm) | 230 x 75 x 85 mm |
| Weight | 979 g |
*In principle, the rc_visard NG can measure infinite ranges. However, the accuracy is decreasing quadratically due to the stereo method, which is why we recommend the measurement range stated above.
| Distance (m) | rc_visard NG | |
|---|---|---|
| Lateral resolution (mm) | 0.5 1.0 2.0 3.0 | 0.3 0.6 1.1 1.7 |
| Depth resolution (mm) | 0.5 1.0 2.0 3.0 | 0.05 0.2 0.9 2.0 |
| Average depth accuracy (mm) | 0.5 1.0 2.0 3.0 | 0.2 0.9 3.5 7.8 |
| Depth image resolution & FPS | min. 0.5 | High: 720 x 540 @ 7.4 Hz (latency: 230 ms) Medium: 360 x 270 @ 25.0 Hz (latency: 70 ms) Low: 240 x 180 @ 25.0 Hz (latency: 50 ms) |
| min. 1.2 | Full: 1440 x 1080 @ 3.0 Hz (latency: 530 ms) High: 720 x 540 @ 16.1 Hz (latency: 170 ms) Medium: 360 x 270 @ 25.0 Hz (latency: 70 ms) Low: 240 x 180 @ 25.0 Hz (latency: 50 ms) |
* in millimeters with high quality stereo matching and random dot projection on non-reflective and non-transparent objects
| Storage/transport temperature | -25 °C to 70 °C |
| Operating temperature | 0 °C to 50 °C |
| Relative humidity (non-condensing) | 20 % to 80 % |
| Vibration | 5 g |
| Shock | 50 g |
| Protection class | IP54 |
| Others |
|
| Min | Nominal | Max | |
|---|---|---|---|
| Supply voltage | 18.0 V | 24 V | 30.0 V |
| Max power consumption | 25 W | ||
| Overcurrent protection | Supply must be fuse-protected to a maximum of 2 A | ||
For more detailed information about our 3D stereo vision products, please visit our Knowledge Base:
You would like to find out whether our portfolio is suitable for your robotic application? Simply request a feasibility study free of charge, and get a live demo of our products.
Would you like to try out one of our sensors and software solutions? Our Try-&-Buy-option gives you the chance to test our products before you decide, and to be sure you make the right choice for your application.