{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

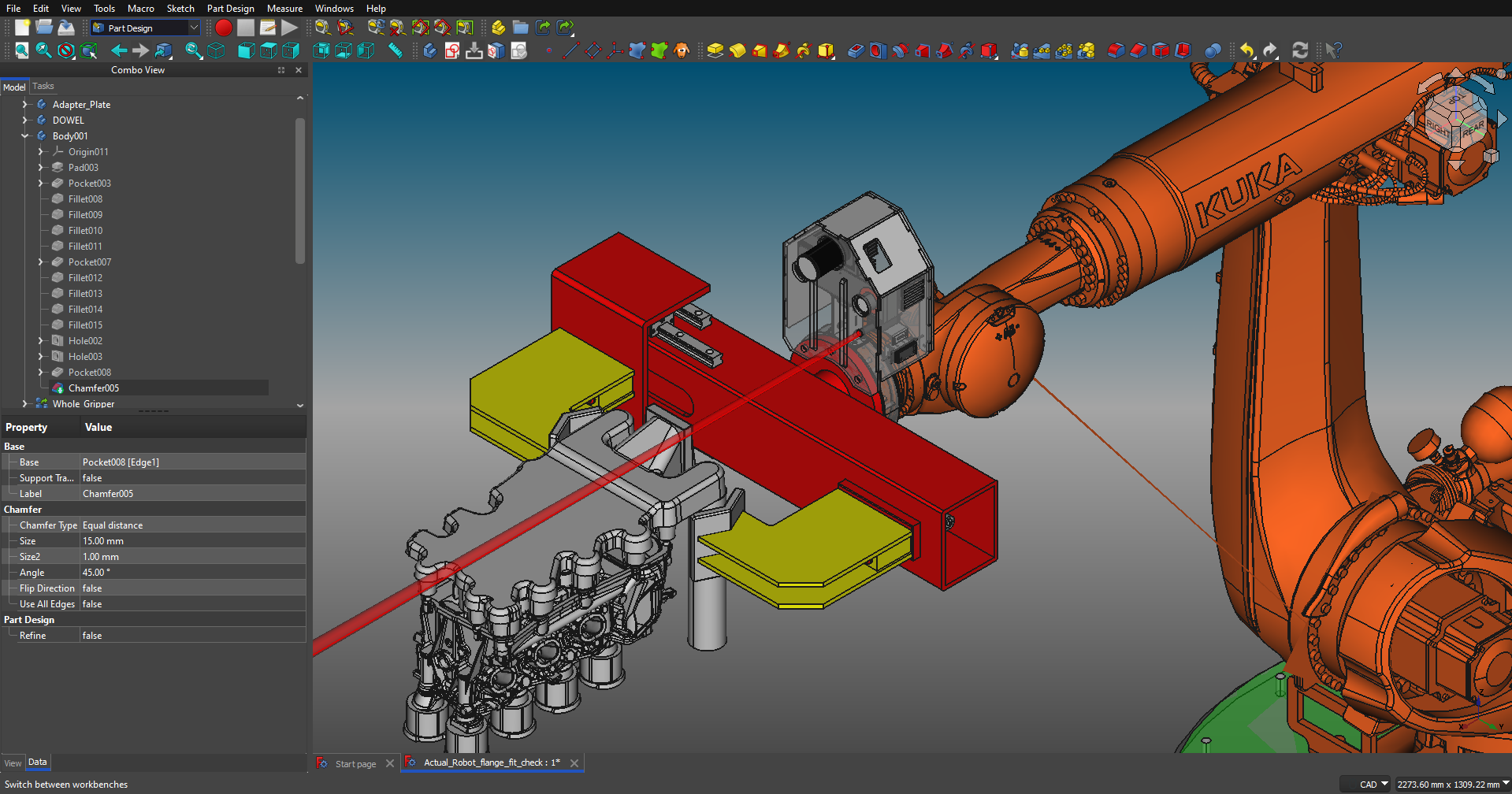
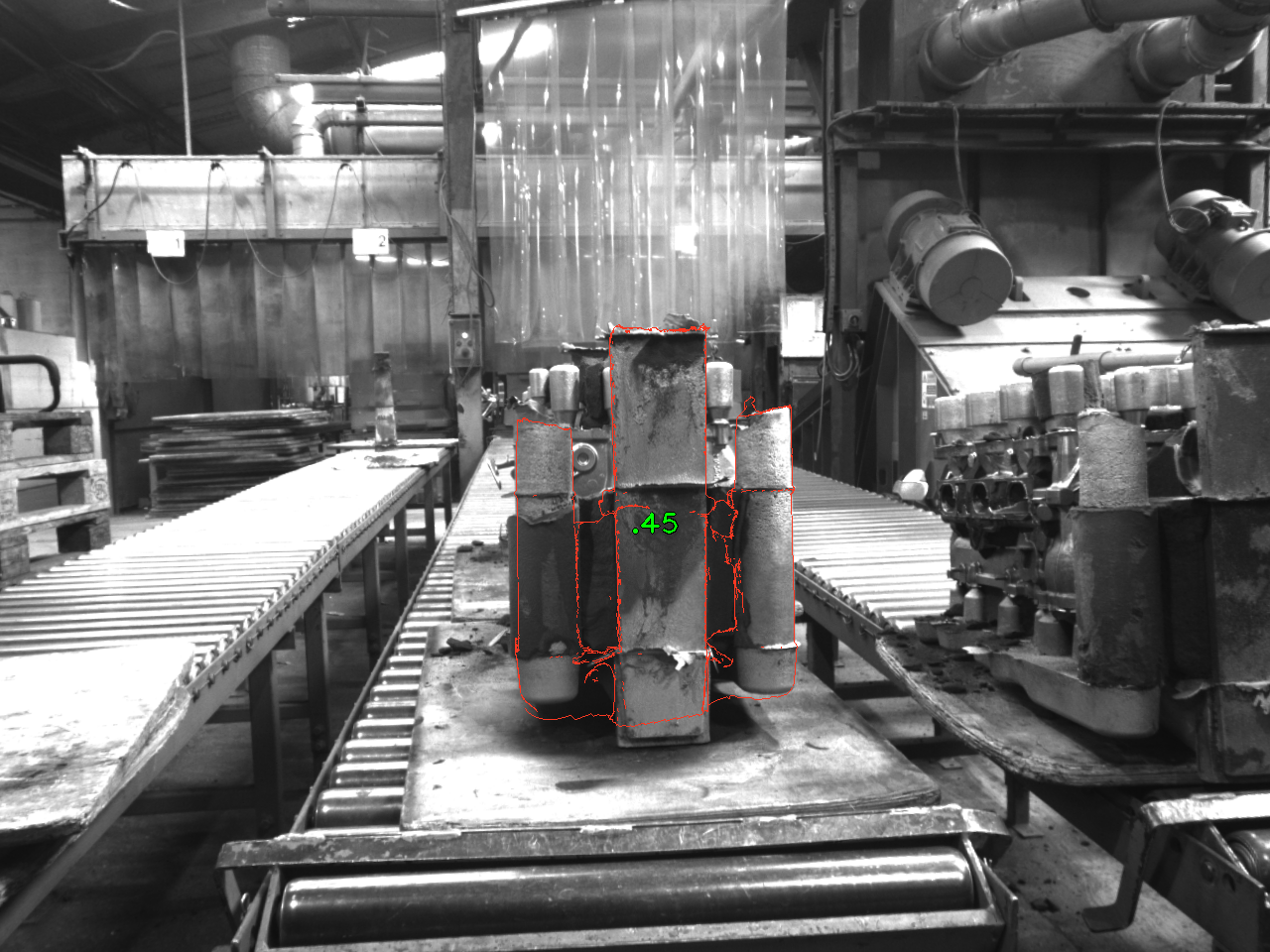
3D Kamera ersetzt manuelles Greifen und spart Platz
Wie ein manueller Montageprozess zuverlässig automatisiert und die benötigte Stellfläche minimiert wurde.






Wie ein manueller Montageprozess zuverlässig automatisiert und die benötigte Stellfläche minimiert wurde.

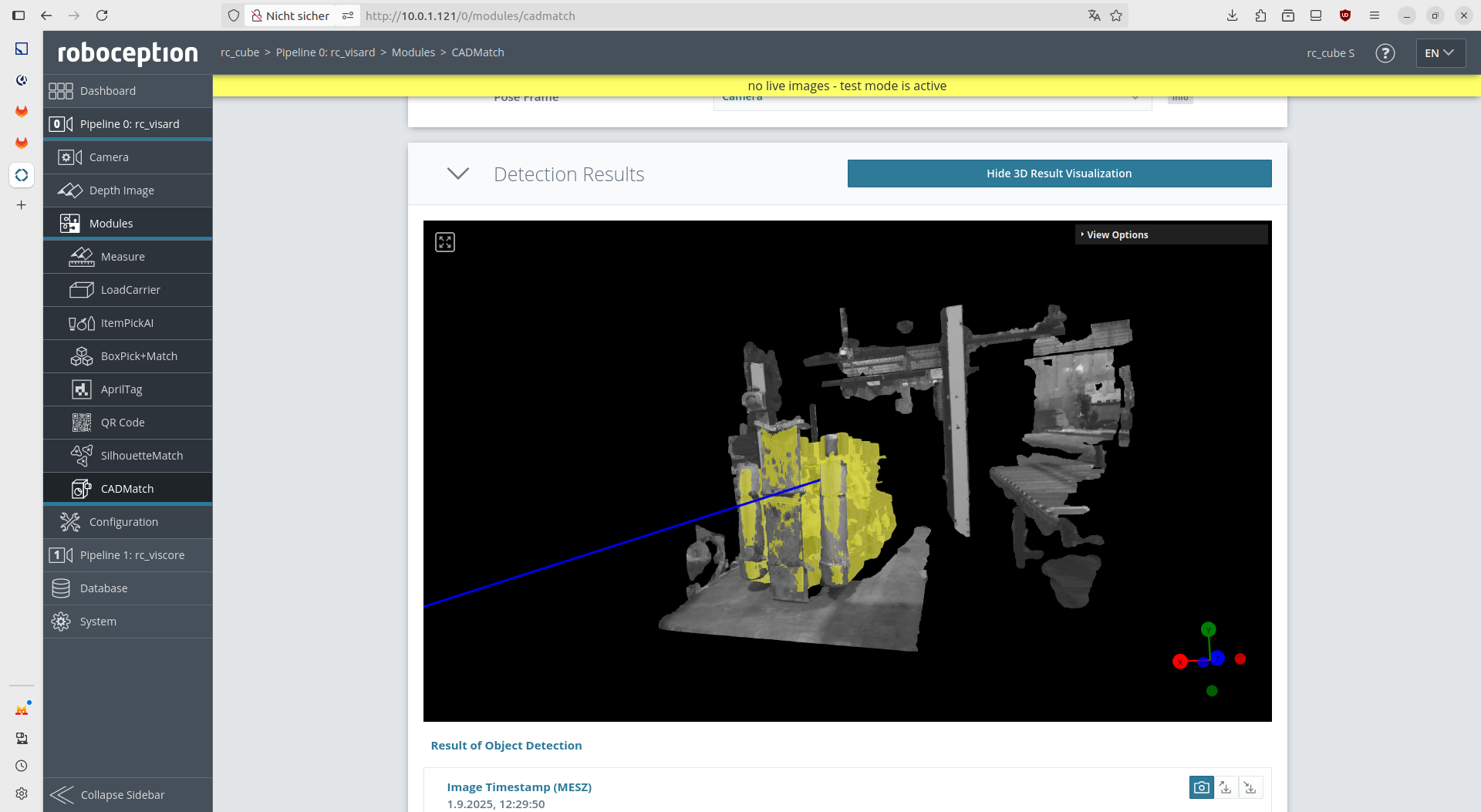
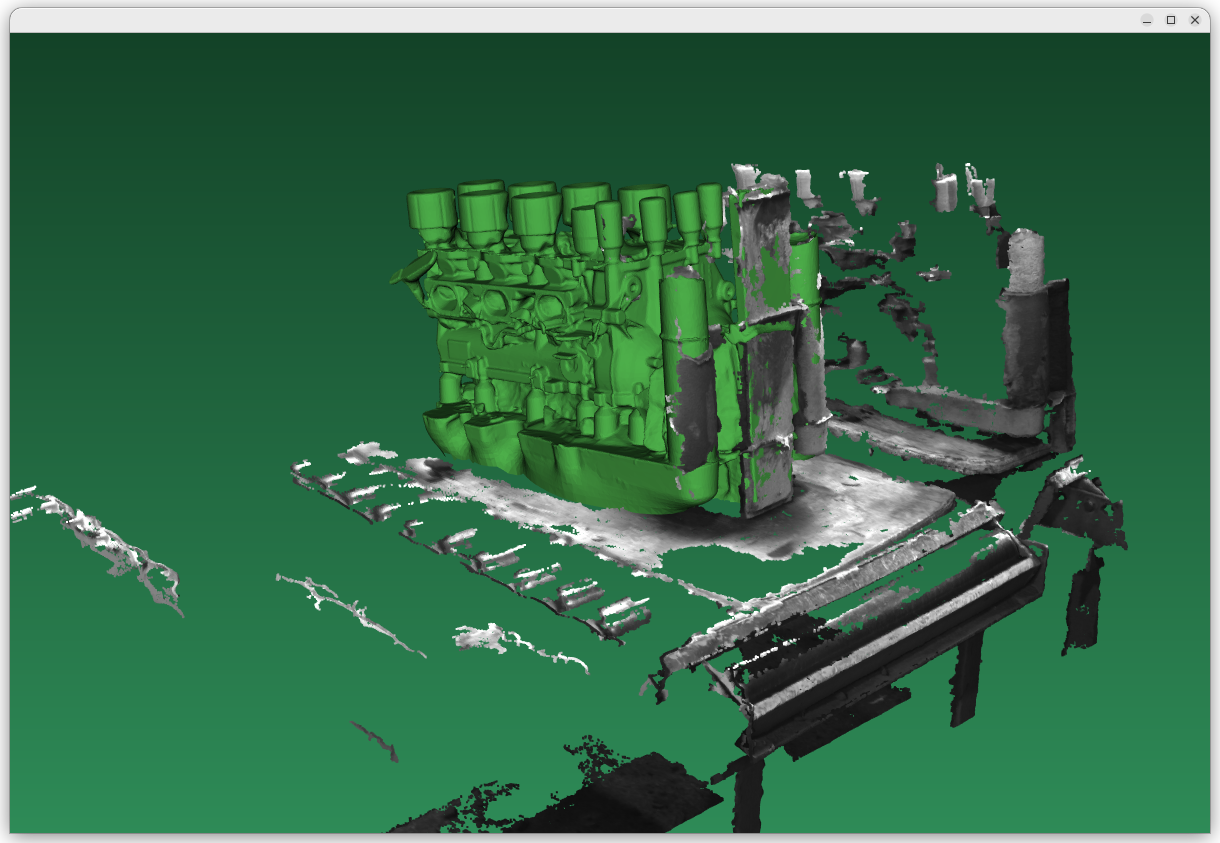
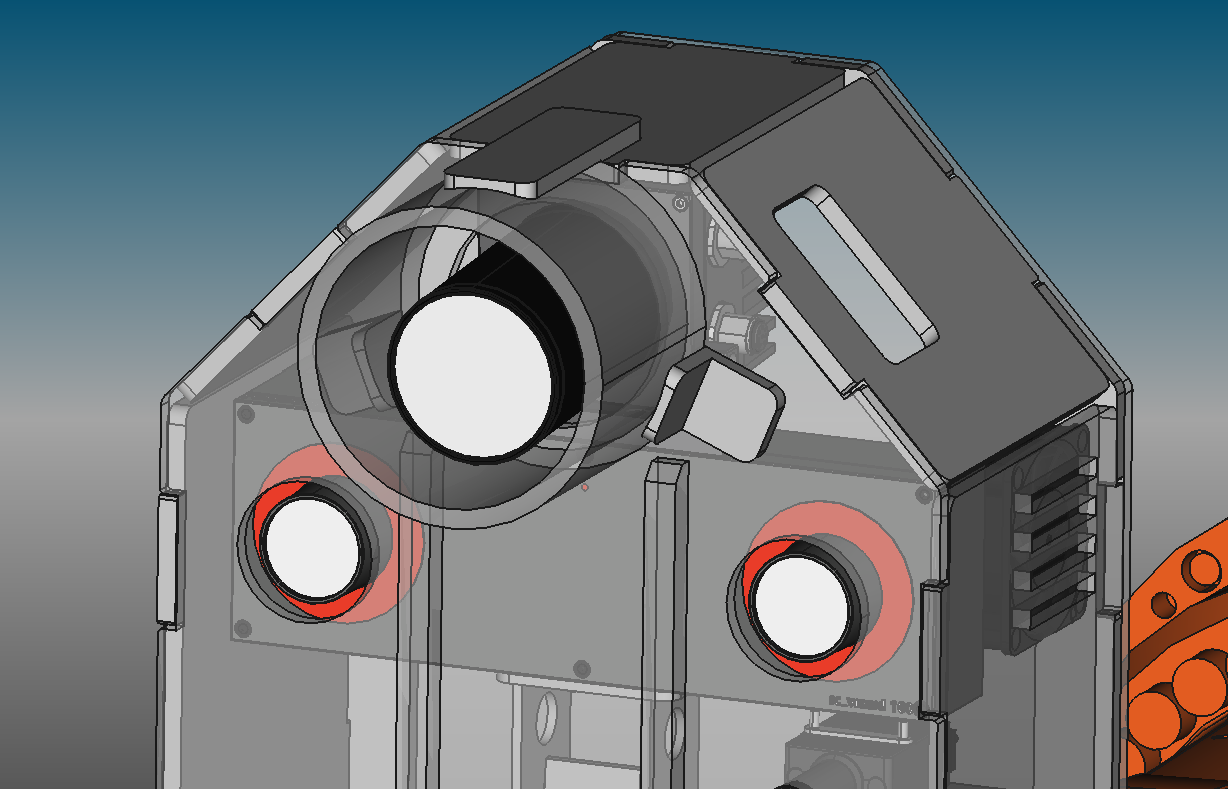
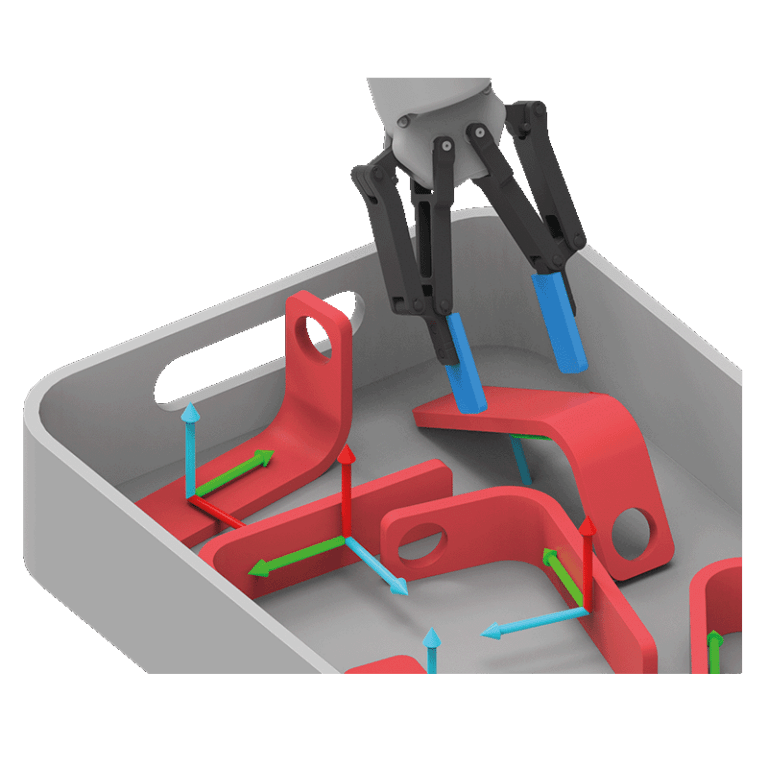
Wie ein Hochleistungs-Bildverarbeitungssystem die Performanceprobleme einer Roboterzelle für automatisiertes Bestücken löste

Wie das Hinzufügen einer Bildverarbeitungskomponente präzises Pick-und-Place für die automatisierte Maschinenbestückung mit über 100 verschiedenen Teilen ermöglicht

Wie ein Vorserienprodukt zur Kernkomponente einer preisgekrönten Intralogistiklösung für automatisiertes Picken wurde