
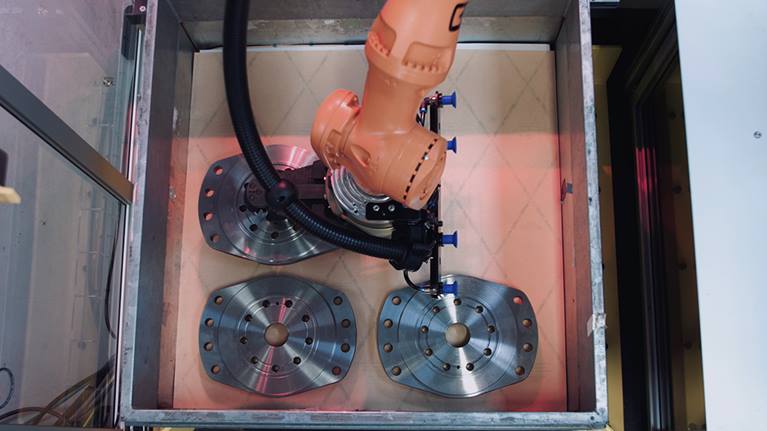
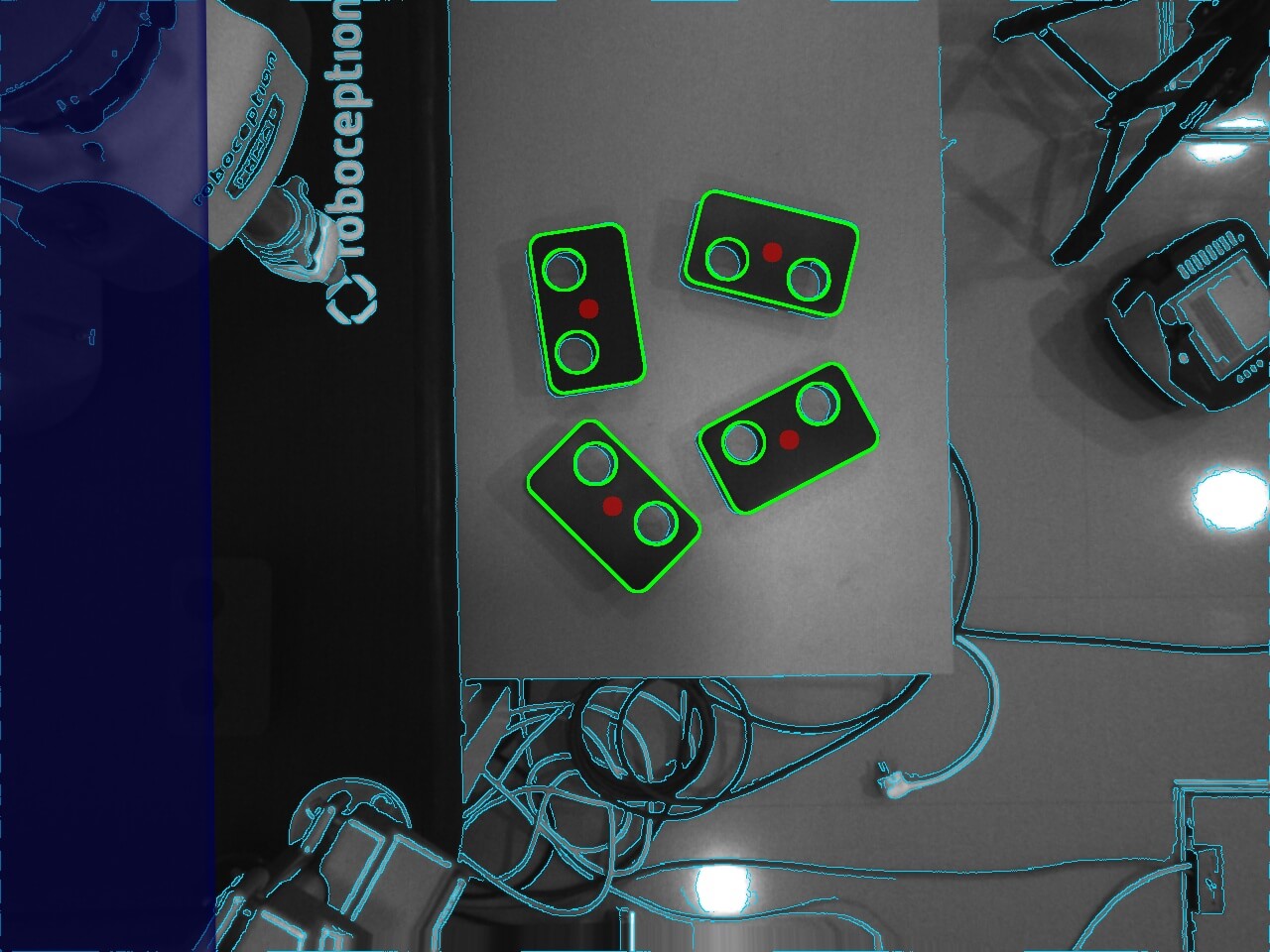
Robot-Vision für die Maschinenbestückung
Wie das Hinzufügen einer Bildverarbeitungskomponente präzises Pick-und-Place für die automatisierte Maschinenbestückung mit über 100 verschiedenen Teilen ermöglicht
Wie das Hinzufügen einer Bildverarbeitungskomponente präzises Pick-und-Place für die automatisierte Maschinenbestückung mit über 100 verschiedenen Teilen ermöglicht


Wie das Hinzufügen einer Bildverarbeitungskomponente präzises Pick-und-Place für die automatisierte Maschinenbestückung mit über 100 verschiedenen Teilen ermöglicht

_800x800")
