rc_visard auf (simulierter) Weltraummission
rc_visard auf (simulierter) Weltraum-
mission
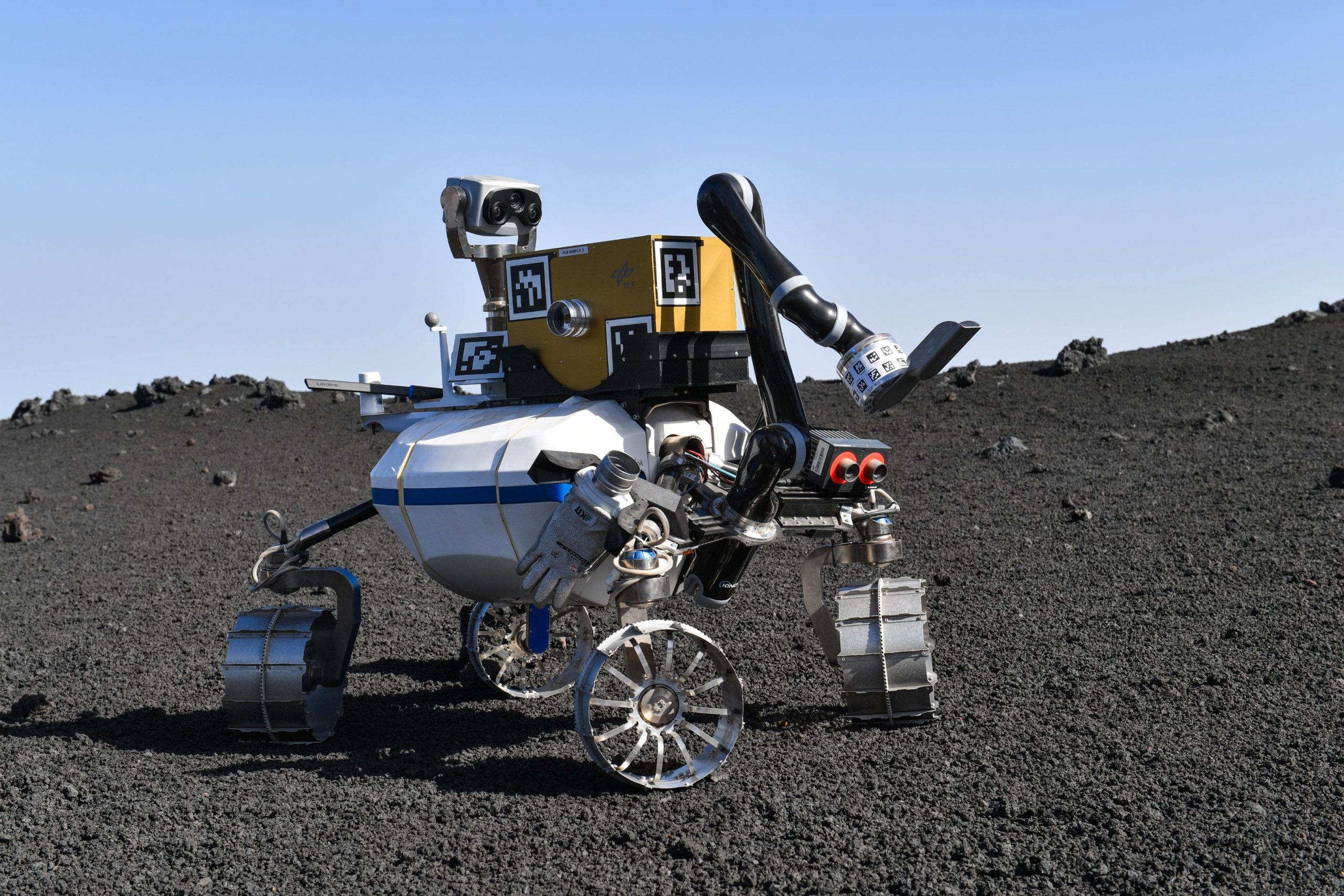
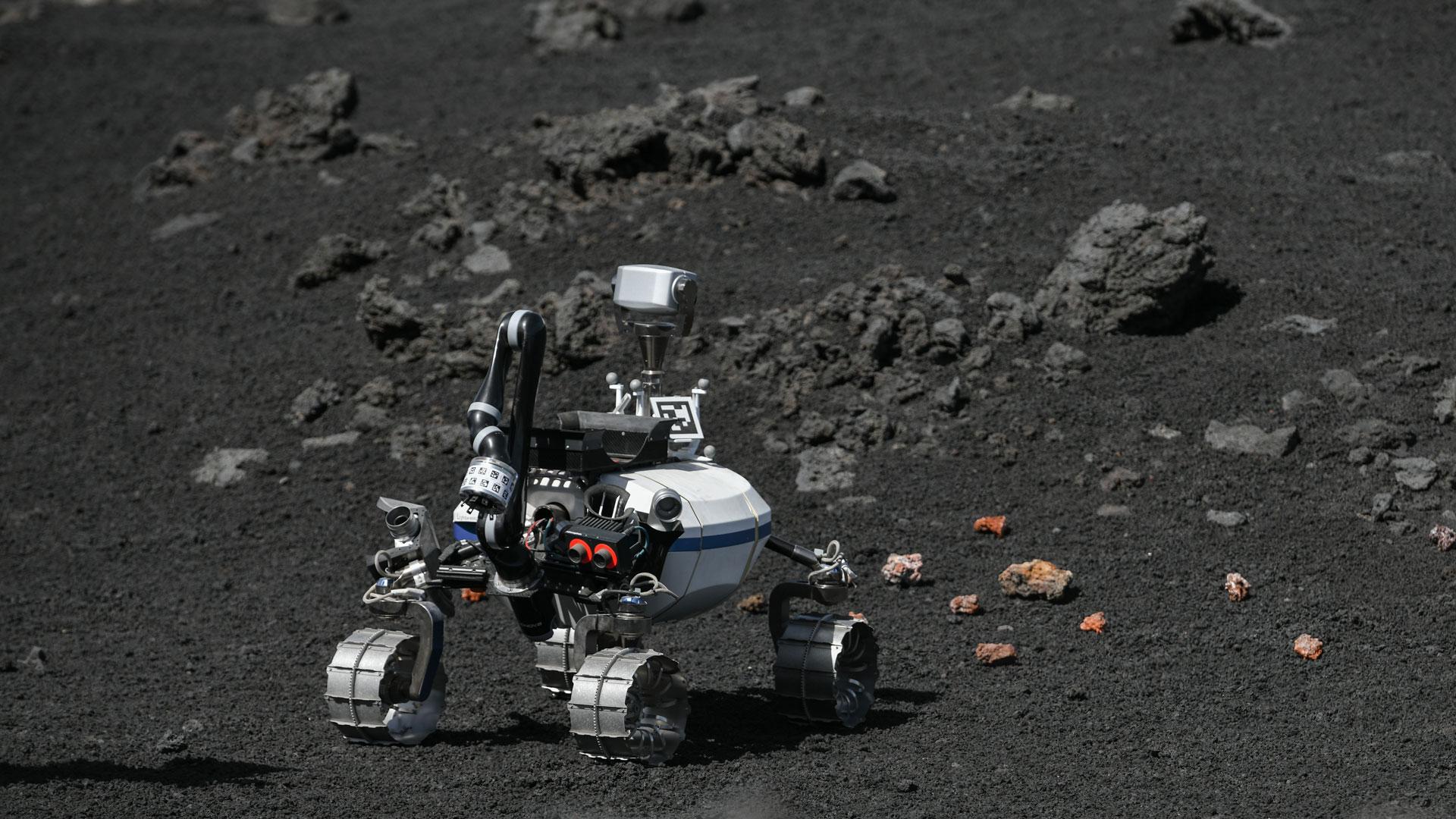
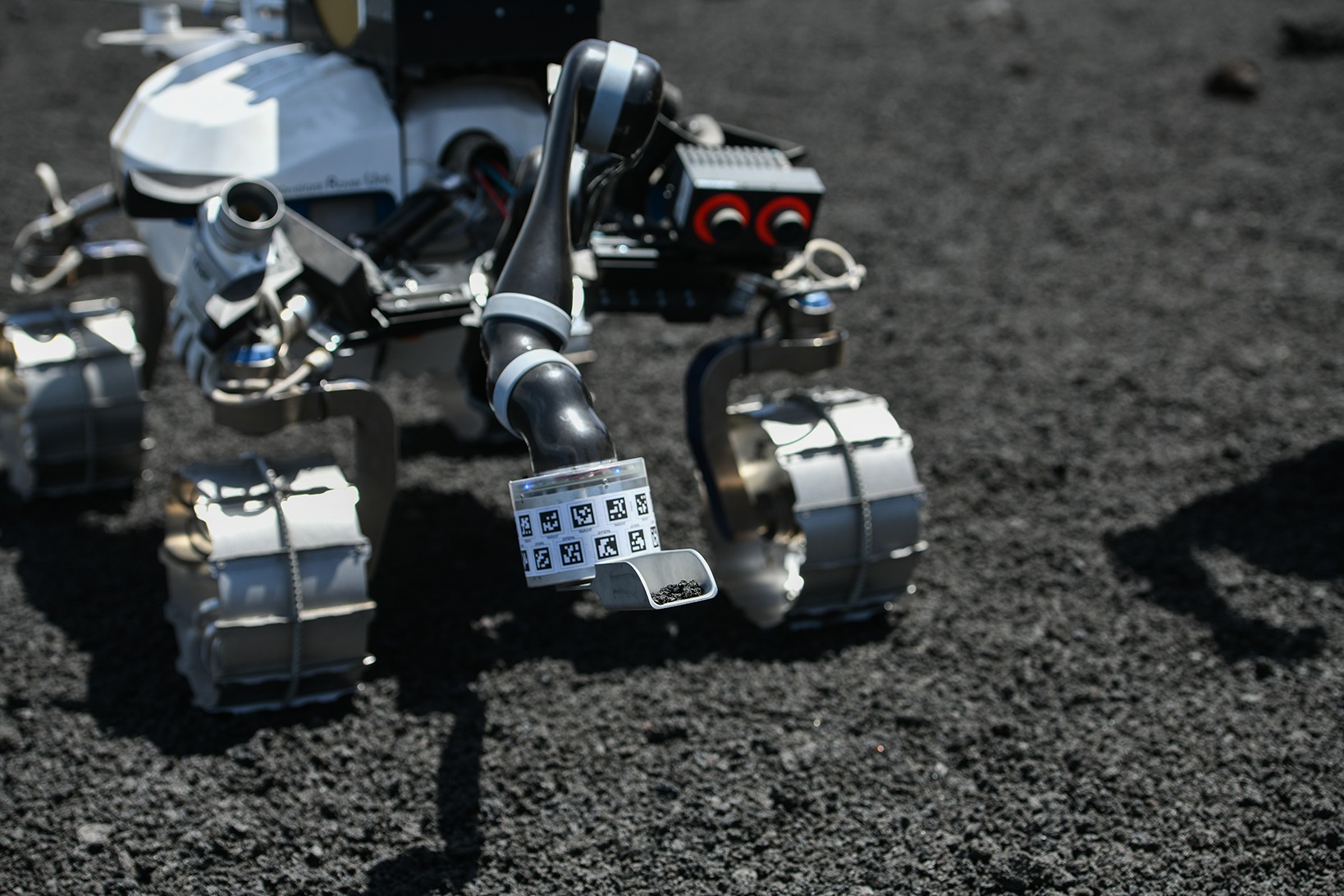
Im vergangenen Monat war der rc_visard Teil einer Planetenerkundungsmission – genauer gesagt, der Simulation einer solchen: Im Rahmen des ARCHES-Projekts brachten das Deutsche Zentrum für Luft- und Raumfahrt (DLR) und seine Partner, darunter das Karlsruher Institut für Technologie (KIT) und die Europäische Weltraumorganisation (ESA), eine kleine Flotte von Robotern zum italienischen Vulkan Ätna, um als „Demo Mission Space“ des Projekts robotische Erkundungen und Experimente zu simulieren.
Montiert auf der Lightweight Rover Unit (LRU) des DLR wurde der rc_visard u.a. zur zuverlässigen Lokalisierung von wissenschaftlichen Instrumenten und Werkzeugen sowie für die interne Umweltmodellierung des Rovers eingesetzt.
Roboception ist ein Industriepartner des ARCHES-Projekts. Bei diesem Helmholtz-Zukunftsprojekt handelt es sich um die Entwicklung heterogener, autonomer und vernetzter Robotersysteme in einem Konsortium der Helmholtz-Zentren DLR, AWI, GEOMAR und KIT, deren zukünftige Anwendungsfelder von der Umweltüberwachung der Ozeane über die technische Krisenintervention bis hin zur Erforschung unseres Sonnensystems reichen. Weitere Informationen über diese Mission, die Tiefsee-Demo-Mission und das Gesamtprojekt finden Sie auf der ARCHES-Projekt-Website…
Alle Bilder © DLR.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- veröffentlicht von: Mareike Suppa
- Kategorie: Allgemein