Die Experten unseres technischen Support-Teams sind per E-Mail und telefonisch erreichbar:
Unser engagiertes Support-Team steht Ihnen mit Rat und Tat zur Seite, um eine reibungslose Integration und optimale Leistung zu gewährleisten. Ihr Erfolg steht für uns an erster Stelle und wir helfen Ihnen gerne bei allen Herausforderungen. Bei Fragen rund um unsere 3D Stereo Vision Lösungen stehen wir Ihnen gerne zur Verfügung.
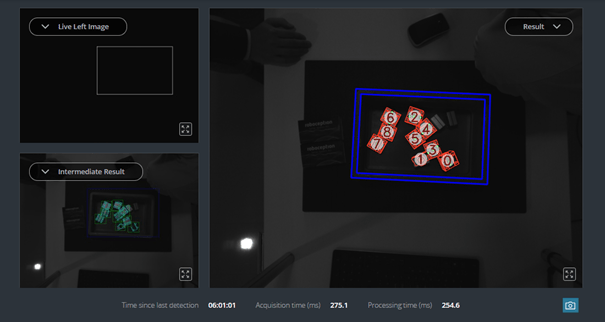
Mit Hilfe der Snapshot-Funktion in unserer WebGUI können wir Sie aus der Ferne unterstützen, ohne Zugriff auf Ihre Installation zu haben. Wenn Sie Ihr System bereits in Betrieb haben, senden Sie uns bitte zusammen mit Ihrer Supportanfrage Snapshots der relevanten Ergebnisse.
Sie können die Snapshots erstellen, indem Sie auf der entsprechenden Seite im WebGUI auf die Schaltfläche mit dem Kamerasymbol in der rechten unteren Ecke des Bildes klicken.
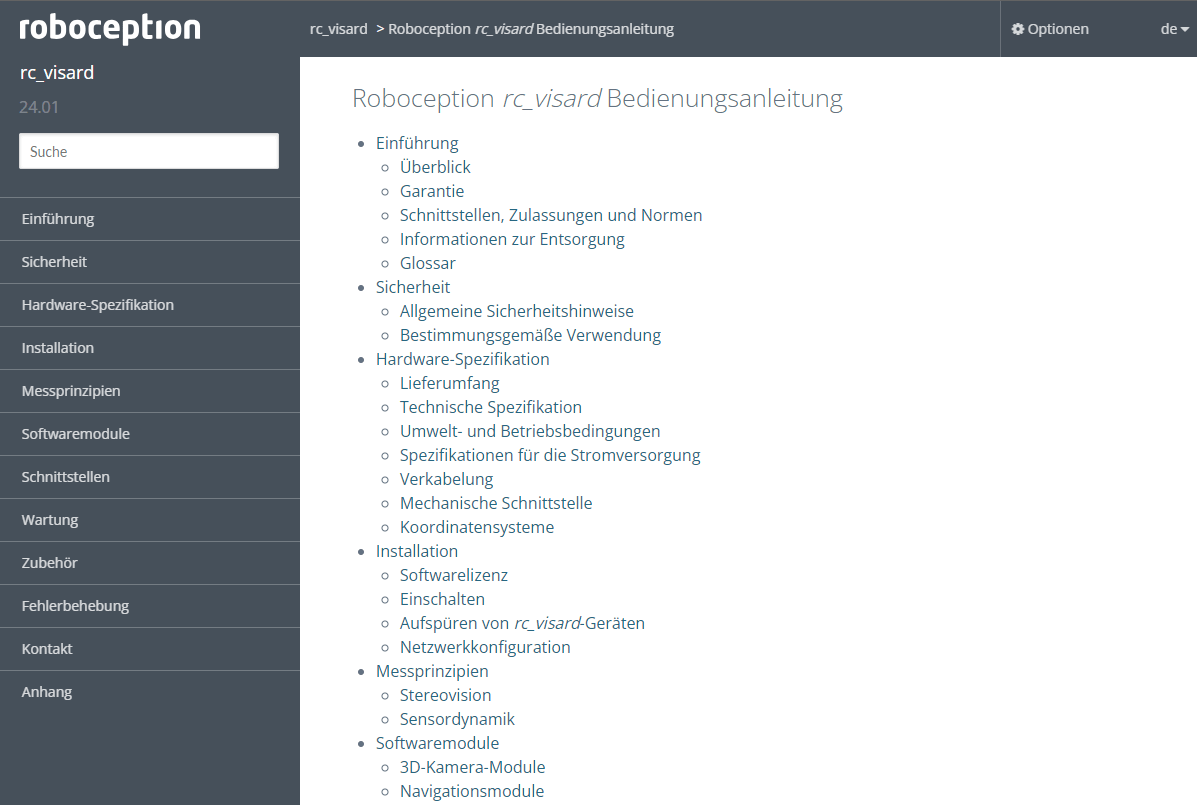
Unsere umfangreiche Online-Dokumentation bietet detaillierte Informationen von der Inbetriebnahme bis zur Schnittstellenkonfiguration. Blättern Sie einfach Schritt für Schritt durch das Menü oder suchen Sie über die Suchleiste gezielt nach dem Thema, das Sie interessiert.
Je nach verwendeter Hardware finden Sie in den nachfolgenden Dokumentationen auch Detailinformationen zu Ihrem Softwaremodul (siehe entsprechende Kapitel in den Dokumentationen zu rc_visard und rc_cube):
rc_visard: https://doc.rc-visard.com/latest/de/index.html
rc_cube: https://doc.rc-cube.com/latest/de/index.html
rc_viscore: https://doc.rc-viscore.com/de/index.html
rc_randomdot: https://doc.rc-randomdot.com/de/index.html
Ausführlichere Schritt-für-Schritt-Anleitungen zu verschiedenen Themen finden Sie auch in unseren Tutorials (in englischer Sprache):
Abhängig von der Art der Anwendung und den mechanischen Anforderungen an die Konstruktion ist der mechanische Einbau des Sensors sehr individuell. Wir beraten Sie gerne über die richtige Montage, den idealen Betrachtungsabstand und andere Faktoren, um eine optimale Installation zu gewährleisten. Darüber hinaus bieten unsere Tutorials und Handbücher detaillierte Anleitungen zur Inbetriebnahme jedes unserer Sensoren.
Der Zugriff auf die WebGUI eines rc_visard, rc_visard NG oder rc_cube ist einfach:
Parameter wie Bildrate, Belichtungszeit und Verstärkungsfaktor bestimmen, wann und wie Bilder aufgenommen werden. Sie haben einen großen Einfluss auf alle Bildverarbeitungsmodule. Darüber hinaus kann die Qualität des Tiefenbildes oft durch die Einstellung der Stereo-Matching-Parameter verbessert werden. Detaillierte Informationen zur Optimierung der Bildeinstellungen finden Sie in unserem Tutorial „Tuning of image parameters“.
Möchten Sie herausfinden, ob unser Portfolio für Ihre Robotikanwendung geeignet ist? Vereinbaren Sie einfach eine kostenlose Machbarkeitsstudie und lassen Sie sich unsere Produkte live vorführen.
Möchten Sie unsere Sensoren und Softwarelösungen ausprobieren? Mit unserer Try-&-Buy-Option haben Sie die Möglichkeit, ein Produkt zu testen, bevor Sie eine finale Entscheidung treffen.