Die SGM®Producer Softwarebibliothek ermöglicht die Ausführung von Stereo-Matching-Prozessen auf der Grafikkarte eines externen Computers.
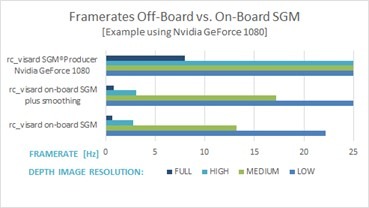
Die Stereomatching-Komponente ist Teil des Basis-Softwarepakets auf jedem rc_visard und rc_visard NG und kann auch für den rc_viscore verwendet werden. Der SGM®Producer ist eine zusätzliche Softwarebibliothek, die eine erhebliche Beschleunigung der Tiefenbildberechnung ermöglicht. Dies geschieht durch die Nutzung der Rechenleistung der Grafikkarte (GPU) eines externen Host-Computers für das Stereo-Matching. Es können Bildwiederholraten von 25 Hz erreicht werden.
Der Wechsel von On-Board- zu Off-Board-Stereo-Matching ist einfach: Alle Schnittstellen, der Anwendungscode, die Semi-Global Matching (SGM)-Verarbeitung und die erzielten Ergebnisse sind identisch. Der entscheidende Unterschied liegt in der Verarbeitungsgeschwindigkeit. Die Installation dieser GenICam-kompatiblen Bibliothek ist einfach: Im Vergleich zum On-Board-Stereo-Matching ändert sich die Schnittstelle nicht und sogar die SGM®-Verarbeitung für mehrere Sensoren auf einer GPU ist möglich.
Zum Beispiel können auf einer Nvidia RTX 2070 Tiefenbilder mit 25 Hz in niedriger, mittlerer und hoher Qualität berechnet werden, sogar von zwei rc_visards gleichzeitig. Stereo-Matching in voller Qualität in 1,2 MPixel Auflösung ist auf dieser Grafikkarte mit 12,5 Hz möglich (im Vergleich zu 1 Hz auf dem Sensor).
Die Software-Bibliothek implementiert den GenICam Transport Layer Interface Standard und kann mit allen GenICam-kompatiblen Anwendungen verwendet werden, die den aktuellen GenTL 1.5 Standard unterstützen, z.B. Halcon von MVTec (ersetzen Sie einfach den GigE Vision Producer durch Roboceptions Bibliothek).
Softwareschnittstelle | rc_visard GenICam API oder andere kompatible Anwendung (muss kompatibel zu GenICam GenTL Version 1.5 sein) |
| Erforderliches Betriebssystem | Windows 10/11 (64 bit), Ubuntu LTS Release (64 bit) und andere Linux-Distributionen auf x86-64 und ARM CPUs. Andere Betriebssysteme auf Anfrage. |
| Erforderliche Grafikkarte | Nvidia GPU mit Rechenleistung 3.5 (d.h. Kepler-Architektur) oder höher, mit mindestens 1,5 GB Memory pro rc_visard. |
| Physische Schnittstelle | Gigabit Ethernet Netzwerk Port für Anschluss eines oder mehrerer Sensoren |
| Alle rc_visard- und rc_viscore-Kunden können die SGM®Producer Softwarebibliothek kostenlos herunterladen und nutzen, die Sensoren dienen in diesem Fall als Dongle. |
Weitere Informationen zu unseren Produkten und Software-Tools für Ihre Robot-Vision-Lösung finden Sie in unserer Knowledge Base:
Möchten Sie herausfinden, ob unser Portfolio für Ihre Robotikanwendung geeignet ist? Vereinbaren Sie einfach eine kostenlose Machbarkeitsstudie und lassen Sie sich unsere Produkte live vorführen.
Möchten Sie unsere Sensoren und Softwarelösungen ausprobieren? Mit unserer Try-&-Buy-Option haben Sie die Möglichkeit, ein Produkt zu testen, bevor Sie eine finale Entscheidung treffen.