

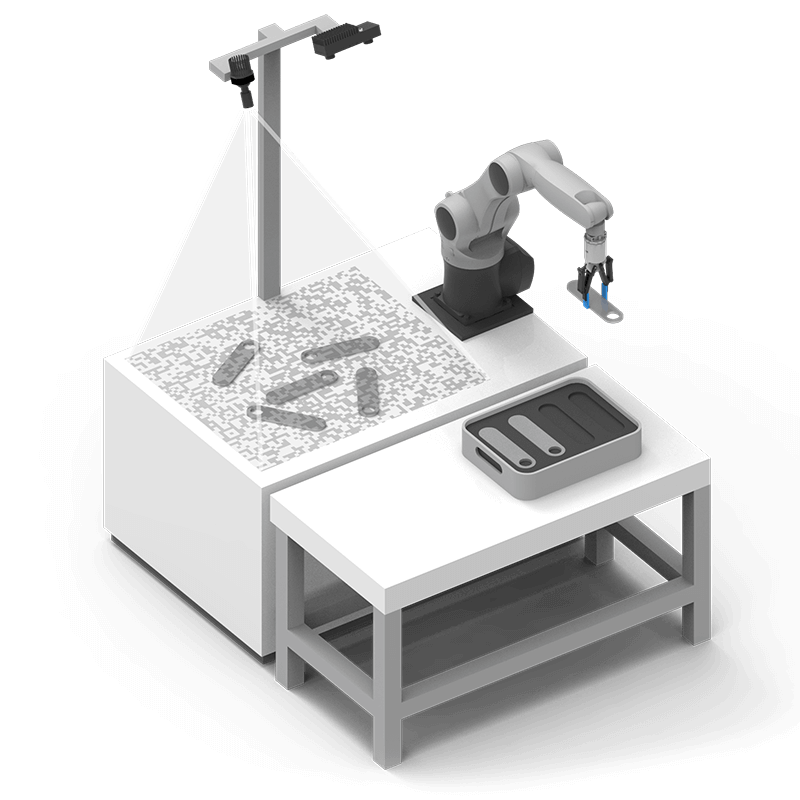
Die flexible rc_visard NG Vision Plattform eröffnet Robotik-Integratoren und Endanwendern neue Möglichkeiten, die Vorteile von Bildverarbeitungslösungen für ihre Automatisierungsvorhaben voll auszuschöpfen. Der smarte 3D-Stereosensor ermöglicht die einfache Integration bewährter Softwarelösungen mit anwendungsspezifischen Ergänzungen. Diese ’nächste Generation‘ des rc_visard wird von der derzeit fortschrittlichsten eingebetteten KI-Lösung unterstützt, der NVIDIA® Jetson Orin™ Serie.
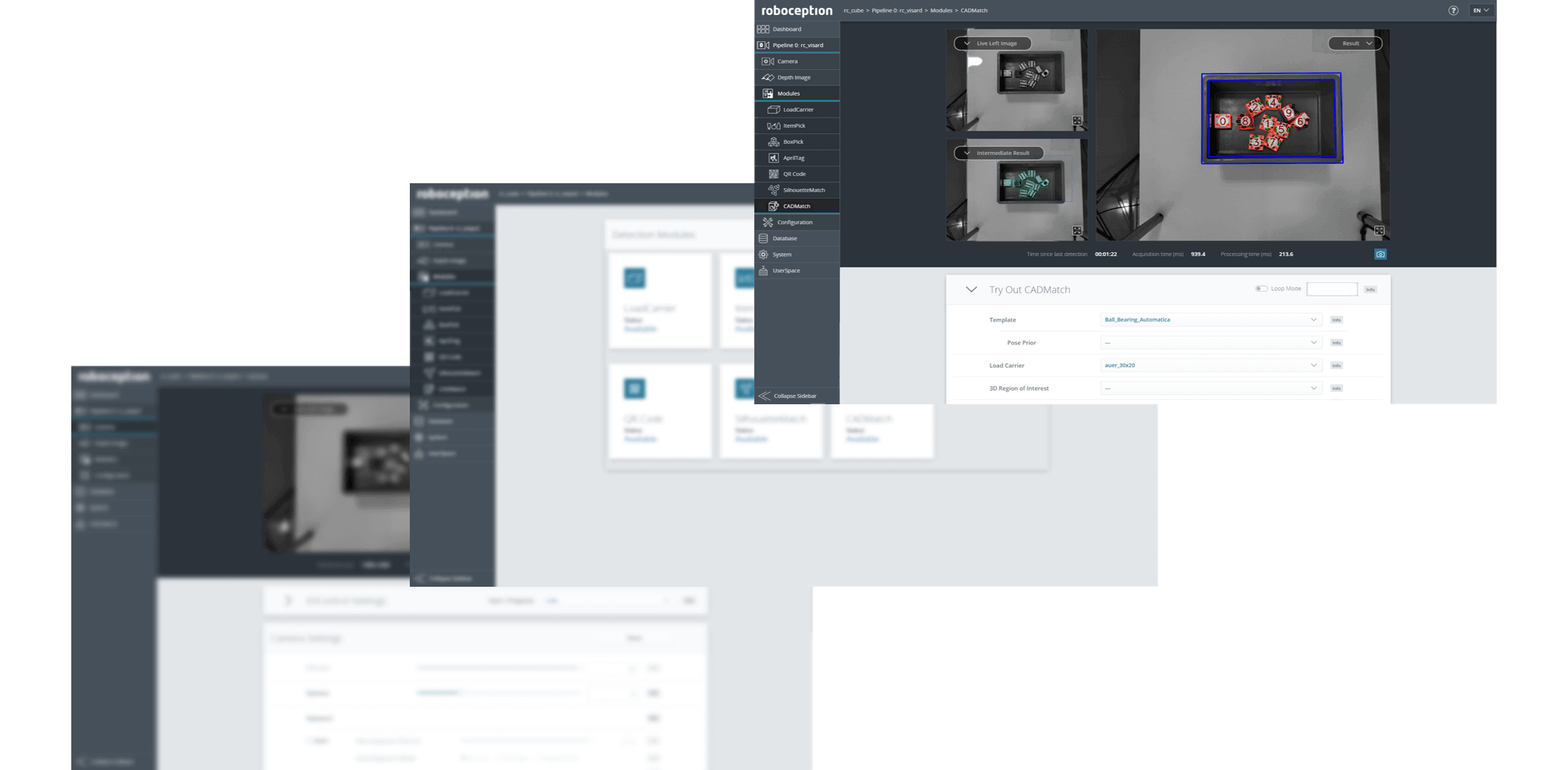
rc_visard NG-Anwender benötigen kein Fachwissen oder Vorkenntnisse in der industriellen Bildverarbeitung: Dank der benutzerfreundlichen Weboberfläche lässt sich der rc_visard NG intuitiv bedienen und der Installationsaufwand ist auf ein Minimum reduziert.
Der rc_visard NG kann auch über Rest-API, ROS, OPC UA und GenICam angebunden und konfiguriert werden.
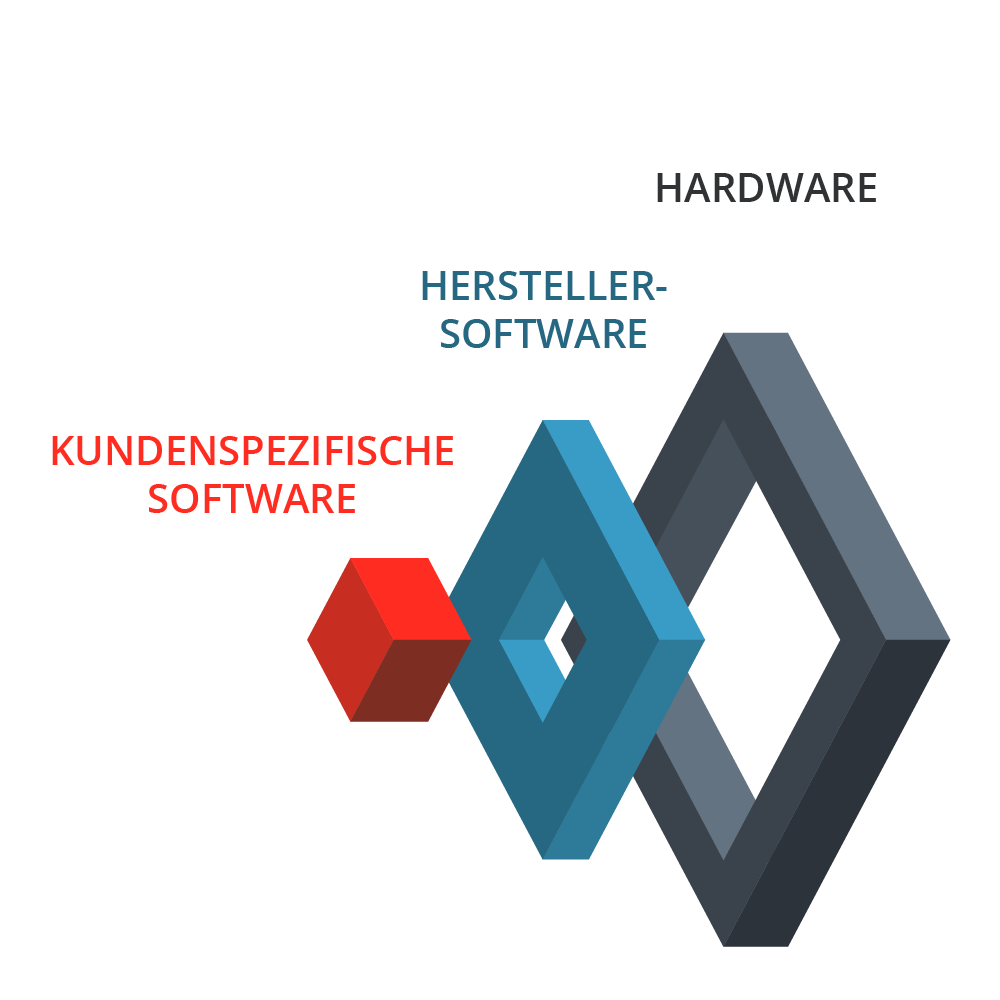
Plattformen für die Bildverarbeitung in der Robotik basieren auf modularen Konzepten, Bausteinen und Plattformtechnologien, um den Anwendern bessere Integrationsprozesse und letztlich stabilere und flexiblere Lösungen zu bieten. Basierend auf den drei Ebenen (1) Hardware, (2) Herstellersoftware und (3) kundenspezifische Software können Anwender maßgeschneiderte Bildverarbeitungslösungen für funktionale Anwendungen entwickeln.
Als hochflexible Robot-Vision-Plattform ist der rc_visard NG die erste Plattform, die alle drei Ebenen in einem Sensor vereint. Ohne zusätzliche Hardware oder externe Rechenleistung liefert der rc_visard NG eine leistungsstarke Bildverarbeitung in einem einzigen Gerät.
Die rc_reason Software Suite ist eine fortschrittliche AppliedAI-Lösung, die speziell für Robotikanwendungen entwickelt wurde:
Der Benutzer wählt das Softwaremodul aus, das am besten zur individuellen Anwendung passt, und mit wenigen Mausklicks liefert der rc_visard NG aufgabenrelevante Informationen wie z-B. Greifpunkte. Über den UserSpace der Plattform können beliebige zusätzliche Software-Elemente eingebunden werden.
Die UserSpace-Funktion ermöglicht es Anwendern, benutzerdefinierte Software über Docker-Container direkt auf der Hardware zu installieren. Der UserSpace ist besonders nützlich für kollisionsfreie Bewegungsplanung, Industrie 4.0-Anwendungen, Bildverarbeitungspipelines oder Anwendungsprogramme – und erspart den Nutzern so die Anschaffung zusätzlicher Hardware für die Ausführung dieser individuellen Softwaretools.
REST-API- und gRPC-Schnittstellen können auch innerhalb des UserSpace verwendet werden, um Greifpunkte und Bilddaten zu erhalten, was den Zugriff auf alle aktivierten rc_reason-Module und angeschlossenen Sensoren ermöglicht.
Der rc_visard NG kombiniert die leistungsstarke Softwaresuite rc_reason mit dem UserSpace, der es Anwendern ermöglicht, eigene Software in Docker-Containern zu installieren – direkt auf dem Sensor. Die intelligente Bildverarbeitungsplattform basiert auf der leistungsstarken NVIDIA® Jetson Orin™ Serie, der fortschrittlichsten eingebetteten KI-Lösung auf dem Markt für Bildverarbeitung in der Robotik.
Dieser kleine KI-Computer wurde für höchste Leistung und Energieeffizienz entwickelt und kann direkt in der Sensor-Hardware untergebracht werden, wodurch der rc_visard NG smarter als je zuvor ist!
| GPU/CPU | Nvidia® Jetson Orin™ Nano 8 GB |
| Basisabstand | 160 mm |
| Brennweite | 6 mm |
| Bildauflösung | 1440 x 1080 Pixel (1,6 MPixel) |
| Sichtfeld | Horizontal: 43°, Vertikal: 33° |
| Tiefenmessbereich* | 0,5 m – 3,0 m |
| Arbeitsbereich | 0,5 m Abstand -> 0,24 m x 0,30 m 1,0 m Abstand -> 0,64 m x 0,60 m 2,0 m Abstand -> 1,44 m x 1,20 m 3,0 m Abstand -> 2,24 m x 1,80 m |
| Kühlung | passiv |
| Abmessungen (BxHxL in mm) | 230 x 75 x 85 mm |
| Gewicht | 979 g |
*Der rc_visard NG kann prinzipiell unendlich weit messen. Aufgrund der Stereomethode nimmt die Genauigkeit jedoch quadratisch ab, weshalb der oben genannte Messbereich empfohlen wird.
| Abstand (m) | rc_visard NG | |
|---|---|---|
| Laterale Auflösung (mm) | 0,5 1,0 2,0 3,0 | 0,3 0,6 1,1 1,7 |
| Tiefenauflösung (mm) | 0,5 1,0 2,0 3,0 | 0,05 0,2 0,9 2,0 |
| Mittlere Tiefengenauigkeit (mm) | 0,5 1,0 2,0 3,0 | 0,2 0,9 3,5 7,8 |
| Tiefenbildauflösung & FPS | min. 0,5 | Hoch: 720 x 540 @ 7,4 Hz (Latenz: 230 ms) Mittel: 360 x 270 @ 25,0 Hz (Latenz: 70 ms) Niedrig: 240 x 180 @ 25,0 Hz (Latenz: 50 ms) |
| min. 1,2 | Voll: 1440 x 1080 @ 3,0 Hz (Latenz: 530 ms) Hoch: 720 x 540 @ 16,1 Hz (Latenz: 170 ms) Mittel: 360 x 270 @ 25,0 Hz (Latenz: 70 ms) Niedrig: 240 x 180 @ 25,0 Hz (Latenz: 50 ms) |
* in Millimetern mit hochqualitativem Stereo-Matching und Random-Dot-Projektion auf nicht-reflektierende und nicht-transparente Objekte
| Lager-/Transporttemperatur | -25 °C bis 70 °C |
| Betriebstemperatur | 0 °C bis 50 °C |
| Relative Feuchte (nicht kondensierend) | 20 % bis 80 % |
| Schwingungen | 5 g |
| Erschütterungen | 50 g |
| Schutzklasse | IP54 |
| Sonstiges |
|
| Min | Nominal | Max | |
|---|---|---|---|
| Versorgungsspannung | 18,0 V | 24,0 V | 30,0 V |
| Max. Leistungsaufnahme | 25 W | ||
| Überstromschutz | Schutz der Stromversorgung mit einer 2-A-Sicherung | ||
Ausführlichere Informationen über unsere 3D-Stereo-Vision-Produkte finden Sie in unserer Knowledge Base:
Möchten Sie herausfinden, ob unser Portfolio für Ihre Robotikanwendung geeignet ist? Vereinbaren Sie einfach eine kostenlose Machbarkeitsstudie und lassen Sie sich unsere Produkte live vorführen.
Möchten Sie unsere Sensoren und Softwarelösungen ausprobieren? Mit unserer Try-&-Buy-Option haben Sie die Möglichkeit, ein Produkt zu testen, bevor Sie eine finale Entscheidung treffen.