KI-basiertes Greifen und orientiertes Ablegen unbekannter Objekte
Die rc_reason ItemPickAI Software ermöglicht ein KI-basiertes Greifen und eine orientierte Ablage unbekannter Objekte – also solcher, die das System nicht explizit über das Einlernen von Modellen gelernt oder vorab in Trainingsdaten gesehen hat.
Diese KI-gestützte Lösung für robotische Pick-and-Place-Anwendungen mit Sauggreifern berechnet ausgerichtete Greifposen auf unbekannten, verformbaren Objekten einer bestimmten Kategorie. Dabei können diese Objekte in chaotischen Kisten bzw. Lastenträgern zugeführt werden, sortenreine wie nicht-sortenreine Konfigurationen sind möglich.
Bei der Inbetriebnahme müssen lediglich die Objektkategorie (z.B. ‚Beutel‘) und die Größe der Saugfläche des Greifers ausgewählt werden. Diese Parameter lassen sich jederzeit flexibel an neue Gegebenheiten anpassen. So können innerhalb kürzester Zeit Pick-and-Place-Anwendungen wie das Kommissionieren und (De)Palettieren auch ohne Expertenwissen im Bereich KI oder Bildverarbeitung effizient umgesetzt werden.
Das rc_reason ItemPickAI Modul kann offboard mit jedem 3D-Sensor über den rc_cube von Roboception eingesetzt und über die Standardschnittstelle konfiguriert und ausgelesen werden. ItemPickAI berechnet eine konfigurierbare Anzahl von Greifposen für eine Saugvorrichtung auf allen identifizierten Objekten innerhalb eines vordefinierten Arbeitsbereichs.
Initiale Identifikation des Ladungsträgers für die Behälterkommissionierung
Zuverlässige Segmentierung auch von verformbaren Objekten einer Objektkategorie und Berechnung von orientierten Greifposen zur gerichteten Ablage
Aktuell unterstützte Objektkategorie ‚Bag‘ (Beutel, Tüte, Sack) und ‚Consumer Goods‘ (Konsumgüter); weitere Kategorien in Vorbereitung
Funktioniert mit statisch oder am Roboterarm montierten Sensoren
Sofort einsatzbereit: Einfach zu installieren und zu bedienen
Verfügbare Objektkategorien (weitere folgen)
Modelltyp 'Consumer Goods'
Der Modelltyp ‚consumer goods‘ ist für die Handhabung von allgemeinen Konsumgütern, typischerweise in Lagerumgebungen, konzipiert. Er ermöglicht die Erkennung und Kommissionierung einer breiten Palette verpackter Alltagsgegenständen wie verpackte Lebensmittel, Getränke, Kosmetikartikel, Reinigungsmittel, verpackte Elektronikartikel, Spielzeug… und vieles mehr.
Modelltyp 'Sheet Metal'
Der Modelltyp ‚Sheet Metal‘ ermöglicht es Benutzern, flache Teile aus Metall und anderen Materialien (z. B. typischerweise Kunststoff) einfach zu greifen und zu platzieren. Die Software liefert zentrierte Greifpunkte für zuvor unbekannte Objekte aus gemischten oder ungemischten Szenarien und ermöglicht ein orientiertes Ablegen auf Basis der Begrenzungsrahmen des Objekts.
Modelltyp 'Bags'
Der Modelltyp ‚bags‘ ist optimiert für die zuverlässige Erkennung und Berechnung von Greifpunkten an Beuteln aller Art mit unterschiedlichen Volumina und Füllständen, z.B. Beutelverpackungen, Päckchen, Versandtaschen, Papiertüten, Säcke,… und ermöglicht das Greifen auch, wenn die Objekte verformbar sind.
Details zur ItemPickAI Software für KI-basiertes Greifen
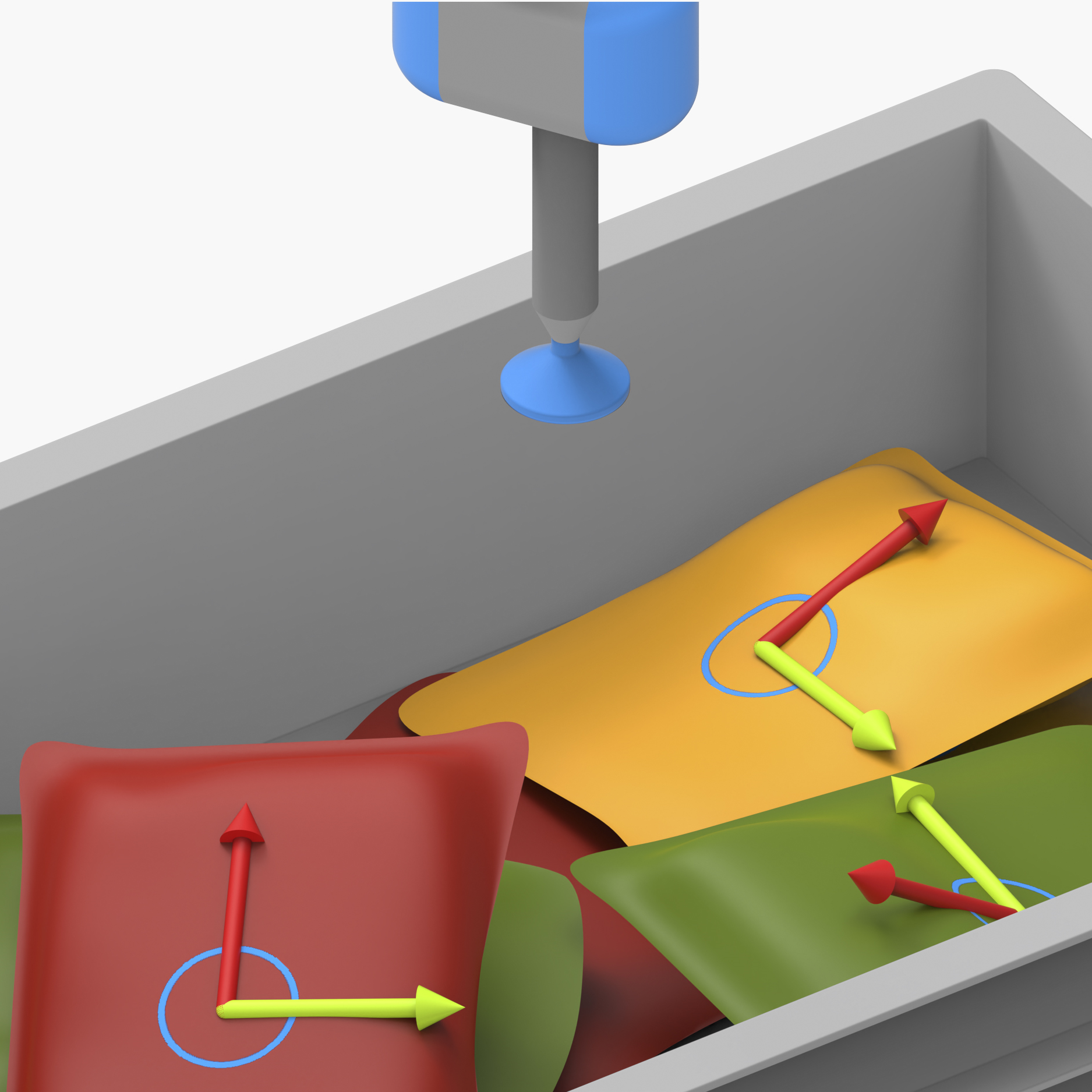
Eine robuste Segmentierung der Objekte mit unebenen Oberflächen und unterschiedlicher, verformbarer Füllung wird durch den Einsatz von neuronalen Netzen ermöglicht. Dadurch wird sichergestellt, dass ein Greifpunkt immer in der Mitte der segmentierten Objekte platziert wird. Zusätzlich wird die Ausrichtung des Objekts ermittelt, um eine orientierte Ablage zu ermöglichen.
Da die Größe der ausgewählten Saugvorrichtung individuell festgelegt werden kann, kann die ItemPickAI Software mit jedem gängigen Sauggreifer verwendet werden.
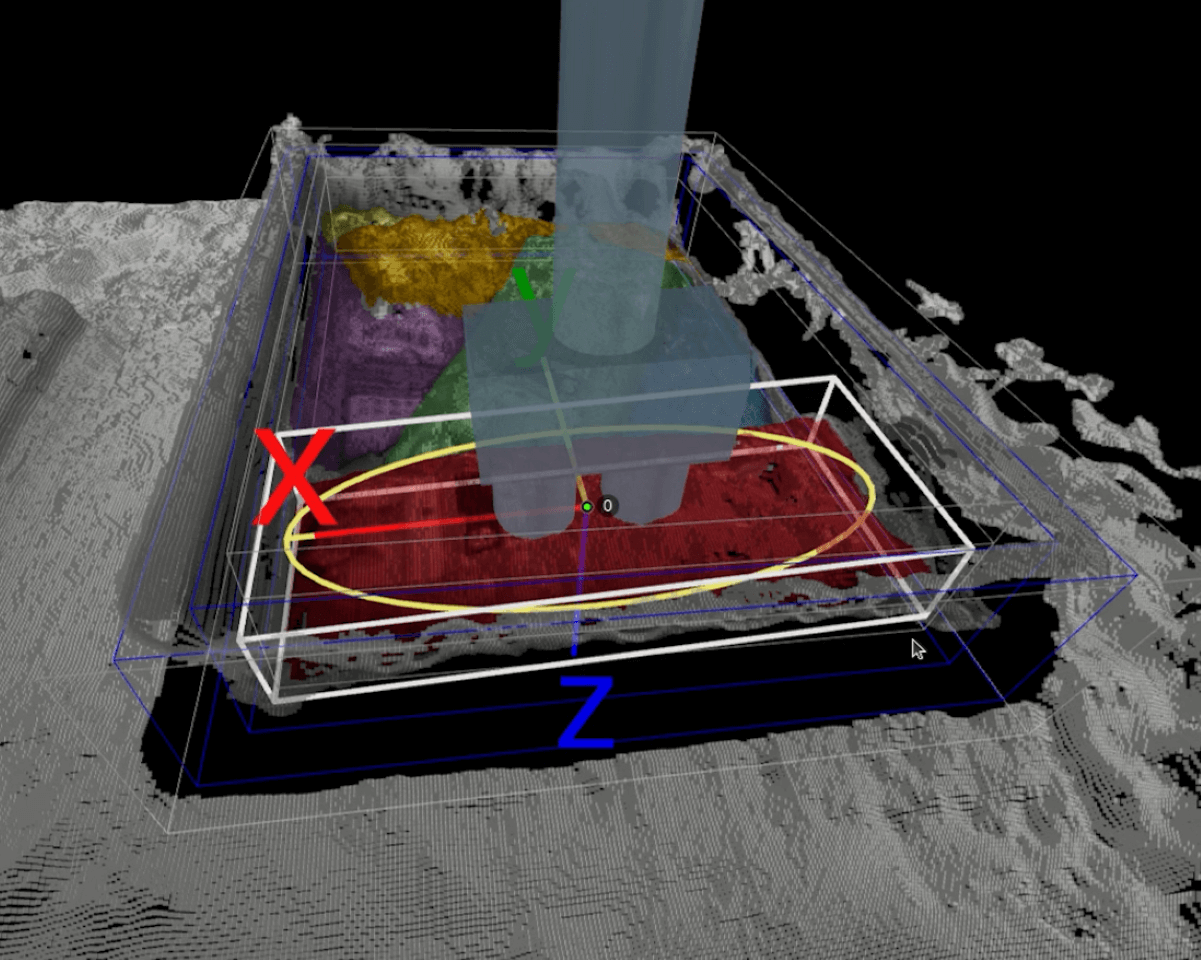
Die Definition des Arbeitsbereichs erfolgt entweder automatisch (z. B. durch Erkennung eines Behälters) oder manuell (durch Definition des Interessenbereiches). Beispielprogramme erleichtern die Integration mit Robotersteuerungen.
Für ItemPickAI-Anwendungen wird die Nutzung des rc_randomdot-Projektors empfohlen, dies gilt insbesondere, wenn im Rahmen des Pickprozesses auch Behälter (z.B. Kisten) erkannt werden müssen.
Zusätzliche Informationen über die ItemPickAI Software für KI-basiertes Greifen
Kompatibler 3D Stereo Sensor ausschließlich mit rc_cube Robotersystem, ausgestattet mit Greifvorrichtung (Sauggreifer) Empfohlen: rc_randomdot projector
Möchten Sie herausfinden, ob unser Portfolio für Ihre Robotikanwendung geeignet ist? Vereinbaren Sie einfach eine kostenlose Machbarkeitsstudie und lassen Sie sich unsere Produkte live vorführen.
Möchten Sie unsere Sensoren und Softwarelösungen ausprobieren? Mit unserer Try-&-Buy-Option haben Sie die Möglichkeit, ein Produkt zu testen, bevor Sie eine finale Entscheidung treffen.




_800x800")
