Roboception bietet mit dem rc_reason BoxPick Modul jetzt eine Lösung für robotische Pick-and-Place-Anwendungen wie beispielsweise das Palettieren und Entpacken von Paletten oder das Sortieren von Paketen.
Ausgestattet mit dem BoxPick Modul erkennt der rc_visard rechteckige Oberflächen in vordefinierten Größenbereichen und berechnet zudem optional potentielle Greifpunkte. Das Modul unterstützt die Erkennung von Position, Orientierung und Größe der Objekte und ermöglicht es dem Roboter, diese an einer vordefinierten Position zu platzieren.
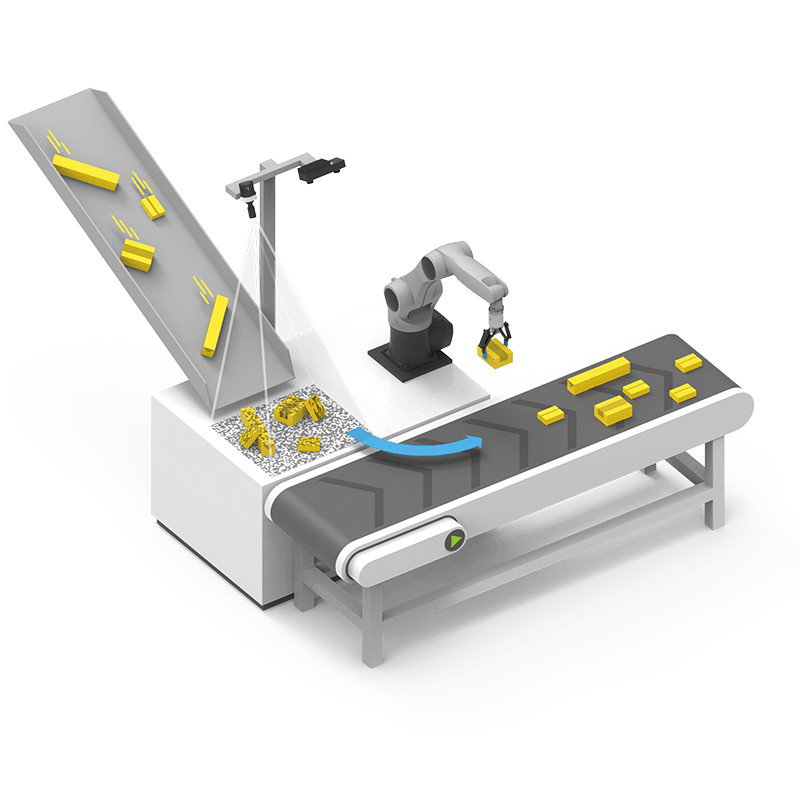
Das BoxPick Modul gestattet es dem Roboter, unsortierte und ungeordnete Pakete aus einer Kiste zu greifen und diese Objekte definiert und ausgerichtet zu platzieren. Es kann auch für das Entpacken von Paletten auf ein Förderband genutzt werden, z.B. auf Quergurtsorter.