KI-basiertes Softwaremodul ermöglicht Greifen und orientiertes Ablegen unbekannter Objekte
Mit dem Softwareimage 25.01.0 hat Roboception auch sein neuestes Softwaremodul auf den Markt gebracht: rc_reason ItemPickAI für KI-basiertes Greifen und eine orientierte Ablage unbekannter Objekte – also solcher, die das System nicht explizit über das Einlernen von Modellen gelernt oder vorab in Trainingsdaten gesehen hat.
ItemPickAI ermöglicht eine automatisierte Vereinzelung und die orientierte Ablage auch von verformbaren Objekten: Robotische Pick-and-Place-Anwendungen wie beispielsweise das Palettieren und Entpacken von Tüten, Säcken und verschiedenen Beutelverpackungen können so präzise und effizient implementiert werden.
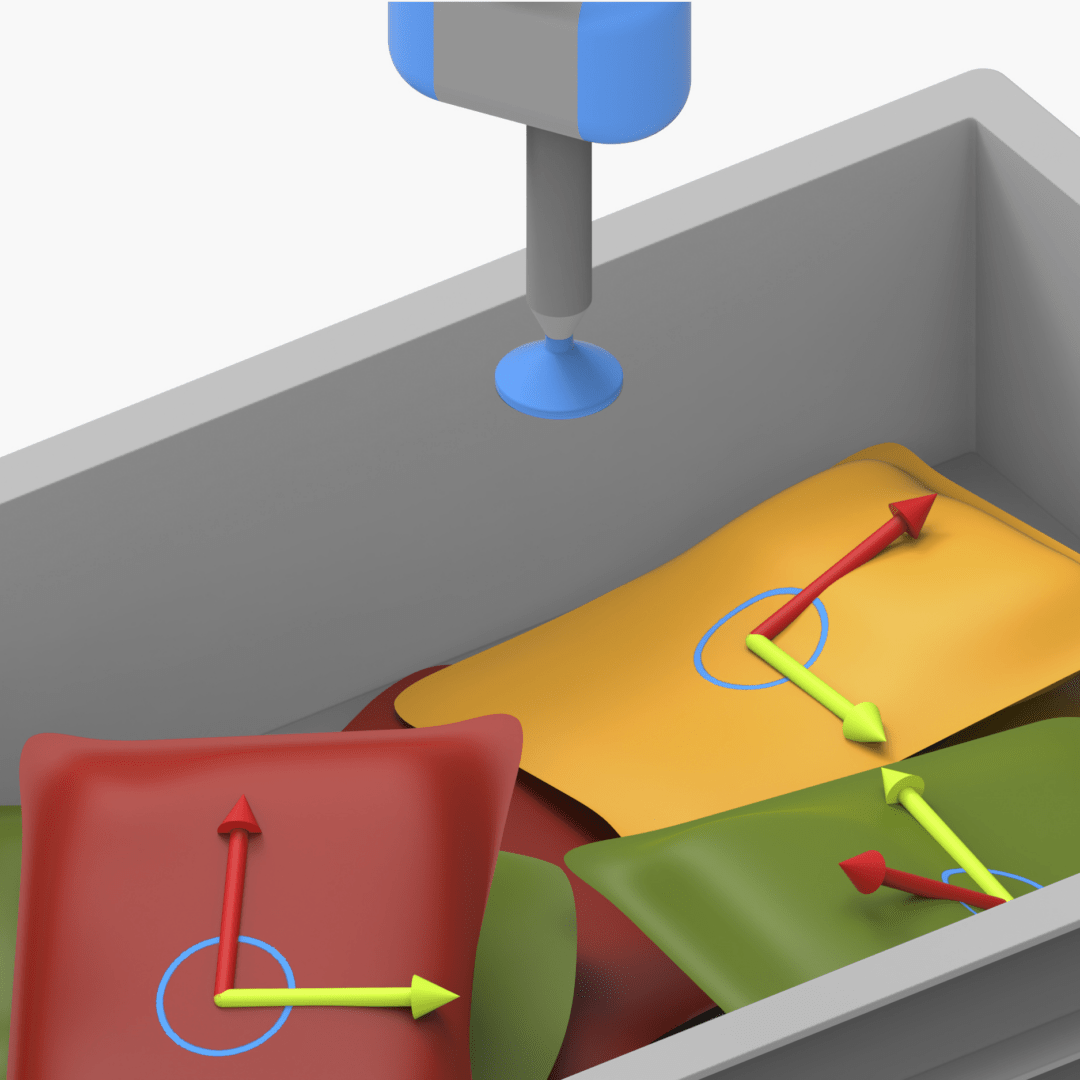
Diese KI-gestützte Lösung für robotische Pick-and-Place-Anwendungen mit Sauggreifern berechnet ausgerichtete Greifposen auf unbekannten, verformbaren Objekten einer bestimmten Kategorie. Dabei können diese Objekte in chaotischen Kisten bzw. Lastenträgern zugeführt werden, sortenreine wie nicht-sortenreine Konfigurationen sowie eine präzise orientierte Ablage sind möglich.
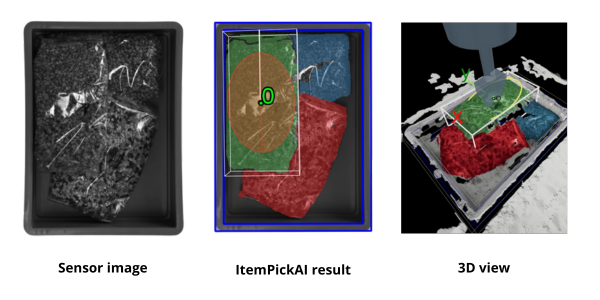
Ein Vision-System aus einem 3D-Stereosensor (rc_visard/ rc_visard NG oder rc_viscore) und ItemPickAI Modul erkennt und segmentiert zuverlässig unbekannte Objekte mit unebenen Oberflächen und verformbarer Füllung und liefert dem Roboter präzise Greifpunkte für eine effiziente Handhabung der Objekte mittels eines Sauggreifers. Eine robuste Segmentierung der Einheiten wird durch den Einsatz von neuronalen Netzen gewährleistet.
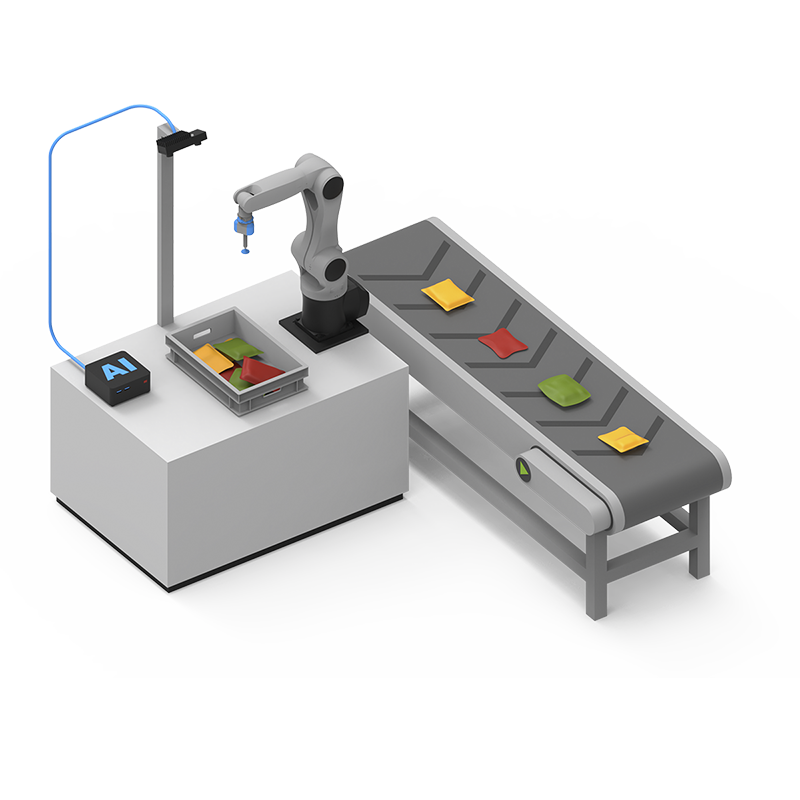
Anwendungen finden sich nicht nur in der klassischen Automatisierung, sondern auch und vor allem im Bereich der Logistik: Mit dem ItemPickAI Modul für KI-basiertes Greifen und orientiertes Ablegen kann der Roboter ungeordnete und knautschbare Objekte aus einer Kiste greifen und diese ausgerichtet platzieren. Zusätzlich eignet sich die Lösung für das Entpacken von Paletten und das Ablegen auf Förderbändern, z. B. auf einen Quergurtsorter.