
Robot Vision for Machine Tending – with No Manual Intervention
How adding a robot vision component enables precise pick-and-place for automated machine tending with 100+ different parts
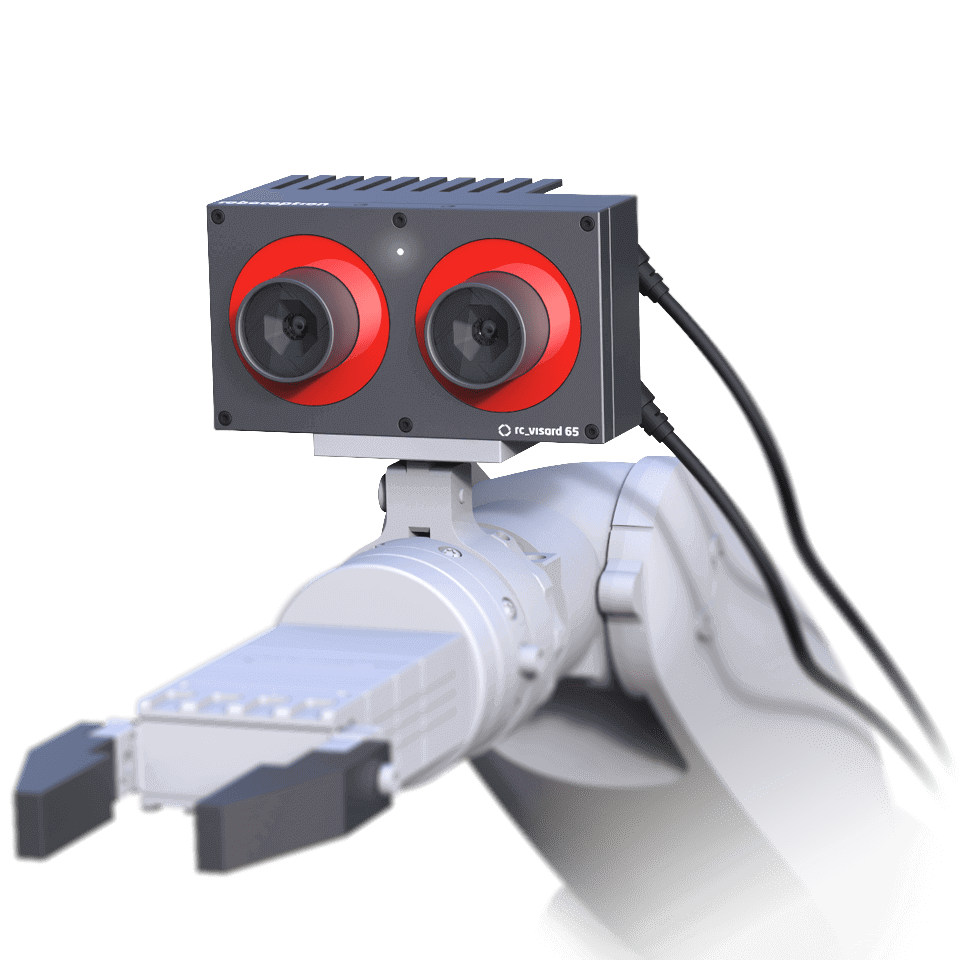

The rc_visard 65 color is optimized for applications with viewing distance of typically less than 50 cm that require color differentiation. Its compact size makes it particularly suited for robot-mounting. As it features color differentiation capacities, the rc_visard 65 color works best in good lighting conditions.

The rc_visard 65 monochrome is optimized for applications with viewing distance of typically less than 50 cm that do not require color differentiation. Its compact size makes it particularly suited for robot-mounting. As its cameras are three times more light-sensitive than color cameras, hence it reliably works even in poor/ variable lighting conditions.

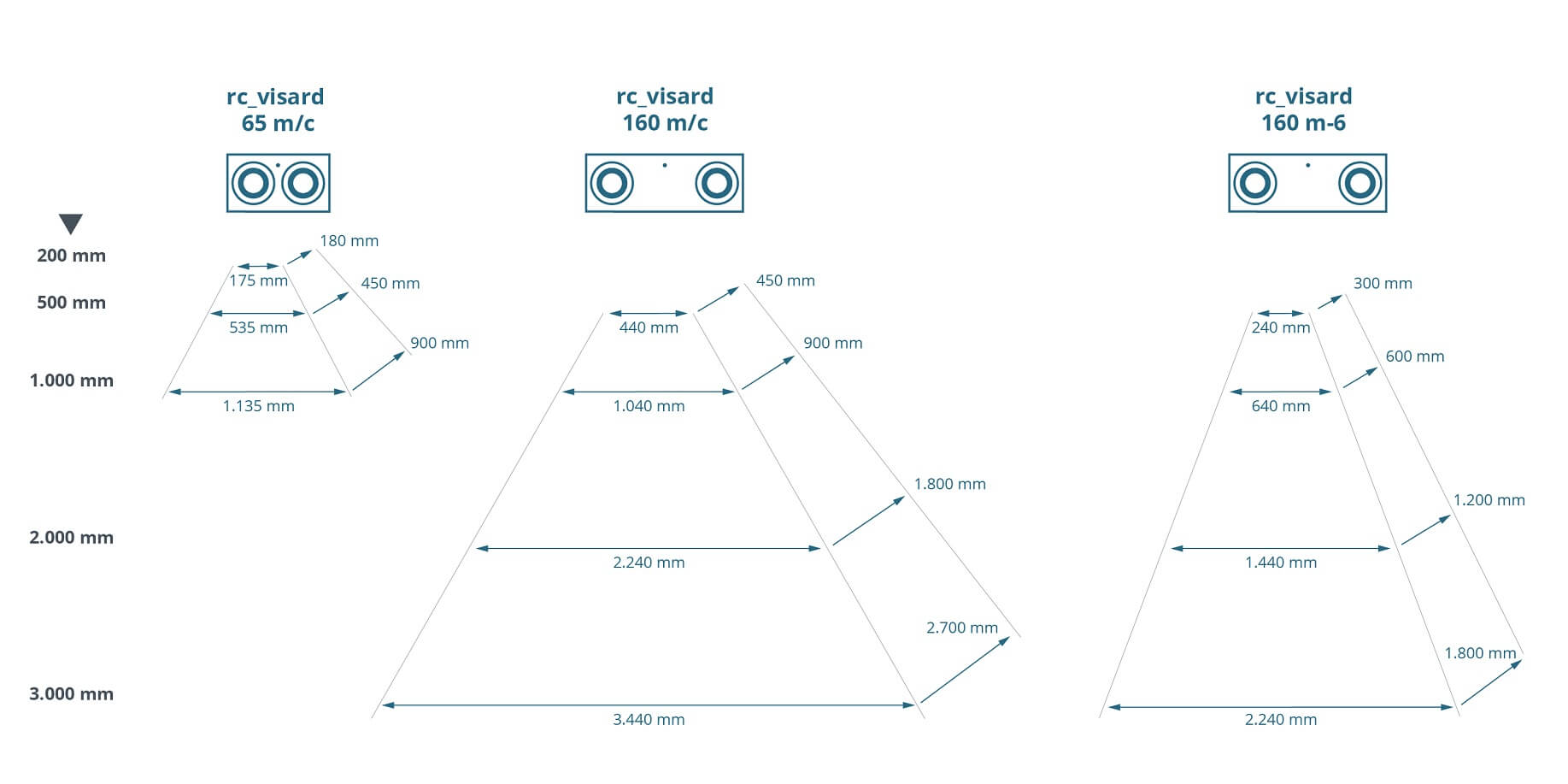
The rc_visard 160 color is optimized for applications that require high precision at larger working distances. It is a good choice for static mounting above a scene as well as in mobile robotics applications, e.g. for navigation. As it features color differentiation capacities, the rc_visard 160 color works best in good lighting conditions.

The rc_visard 160 monochrome is optimized for applications with a viewing distance greater than 50 cm that do not require color differentiation. The rc_visard 160 monochrome relies on cameras that are three times more light-sensitive than color cameras; hence it reliably works even in poor/variable lighting conditions.
The rc_visard 160 monochrome is available in two variants:
The rc_visard 65 color is optimized for applications with viewing distance of typically less than 50 cm that require color differentiation. Its compact size makes it perfect for robot-mounting. As it features color differentiation capacities, the rc_visard 65 color is best applied in good lighting conditions.
The rc_visard 65 monochrome is optimized for applications with viewing distance of typically less than 50 cm that do not require color differentiation. Its compact size makes it perfect for robot-mounting and as its cameras that are three times more light-sensitive than color cameras, it reliably works even in poor/ variable lighting conditions.
The rc_visard 160 color is optimized for applications that require a high precision at larger working distances. It is a good choice for static mounting above a scene as well as in mobile robotics applications, e.g. for navigation. As it features color differentiation capacities, the rc_visard 160 color is best applied in good lighting conditions.
The rc_visard 160 monochrome is optimized for applications with a viewing distance greater than 50 cm that do not require color differentiation. It relies on cameras that are three times more light-sensitive than color cameras; hence it reliably works even in poor/variable lighting conditions.
Please note that the rc_visard 160 monochrome is available in two variants: With a focal length of 6 mm or the standard 4 mm. The focal length of 6mm enables a higher resolution and accuracy n a slightly smaller viewing area. This can be useful for set-ups with rather large viewing distance.

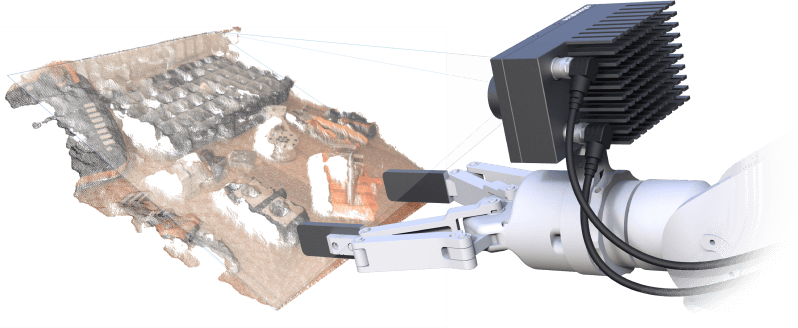

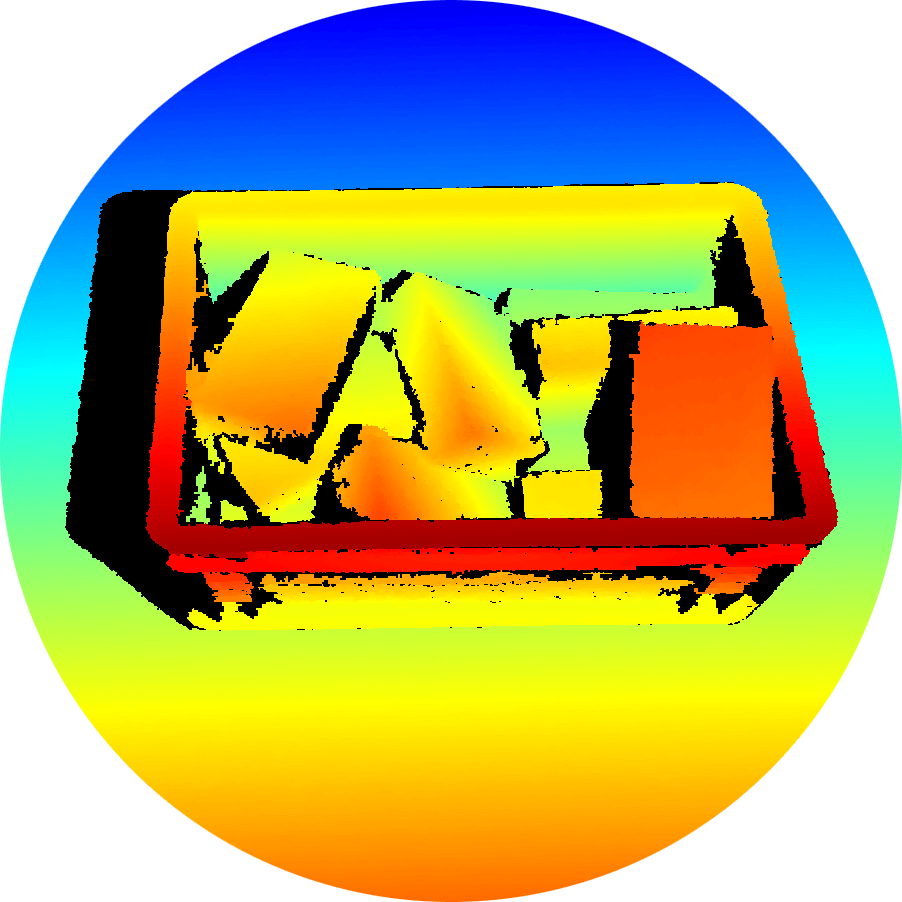
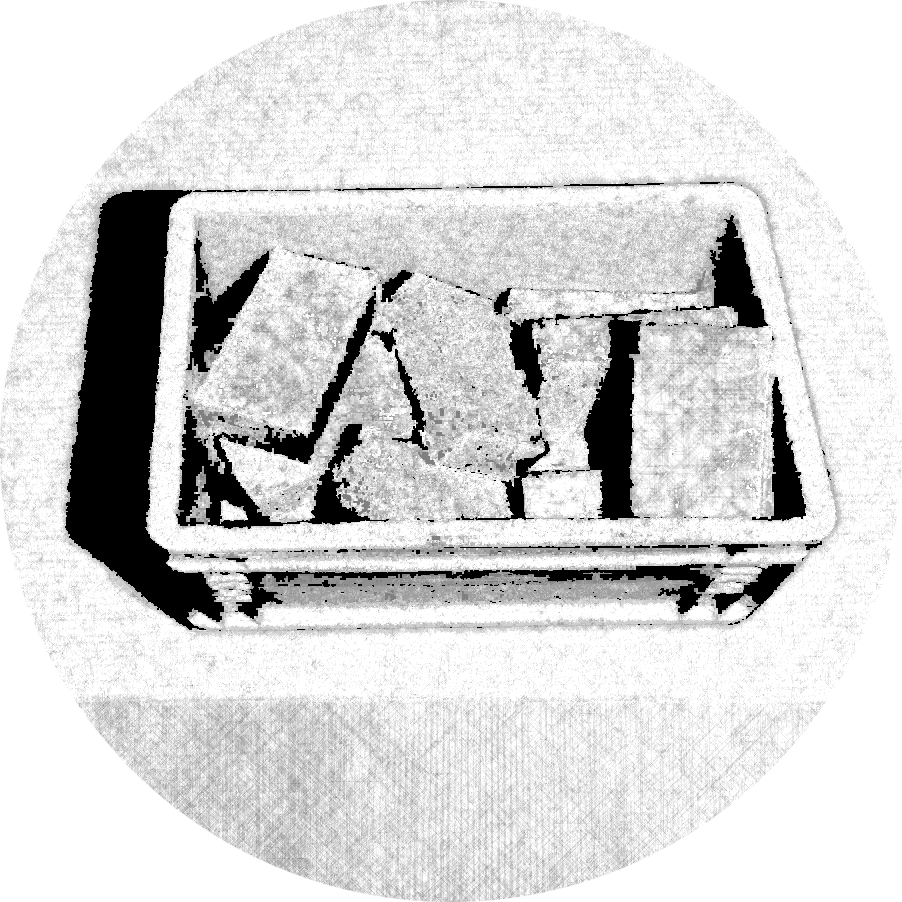

 rc_visard can be used reliably in indoor and outdoor areas.
rc_visard can be used reliably in indoor and outdoor areas.
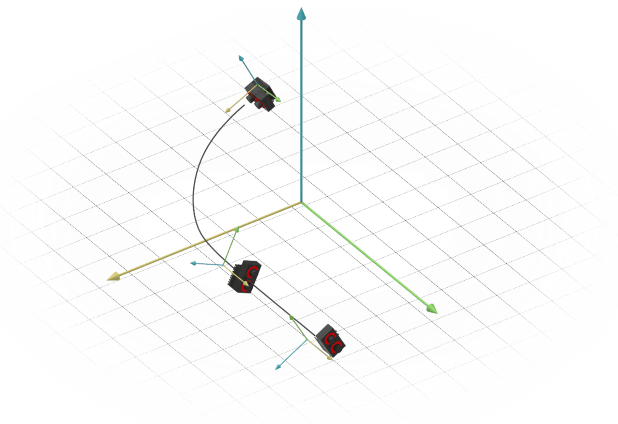
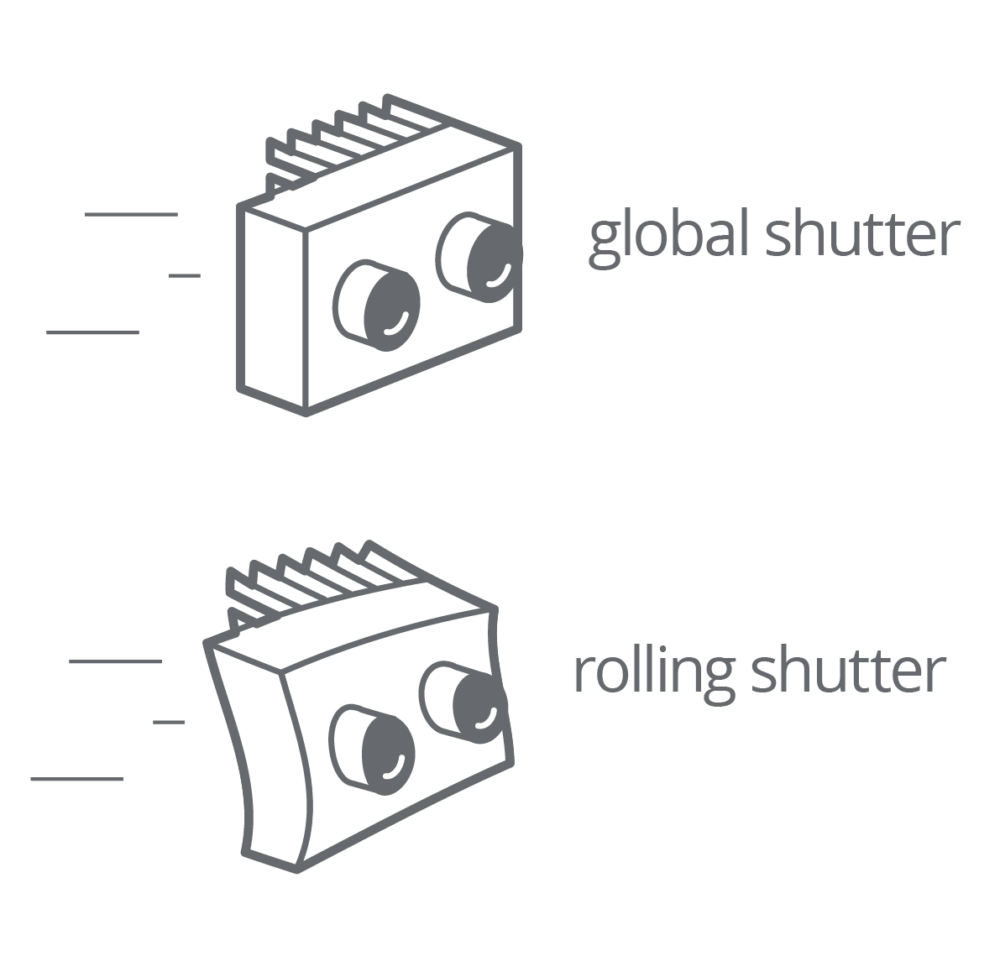 Accurate image data even with fast movements.
Accurate image data even with fast movements.
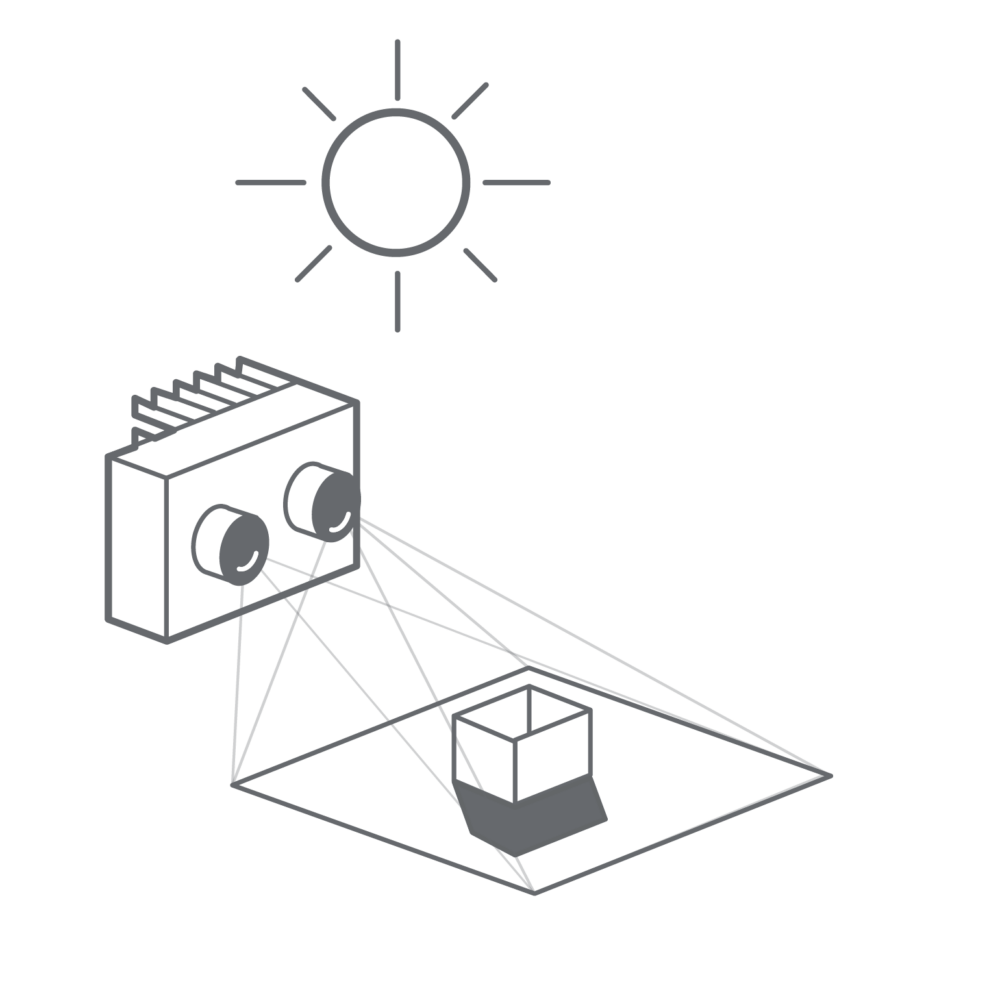
 Several sensors can operate in a limited space without interference.
Several sensors can operate in a limited space without interference.

_800x800")

How adding a robot vision component enables precise pick-and-place for automated machine tending with 100+ different parts

How adding a robot vision system led to increased robustness and 50% reduced cycle time in refractory bricks production processes

How RG Technologies added automatic contour detection as a key USP into their software solution for leather processing

Precise localization delivered by robot vision solution enables robust pick-and-place operations in lab automation.