The rc_reason software suite offers application-oriented modules that can further optimize your robotic application.
The rc_reason Software Suite Provides Brains for Your Robot
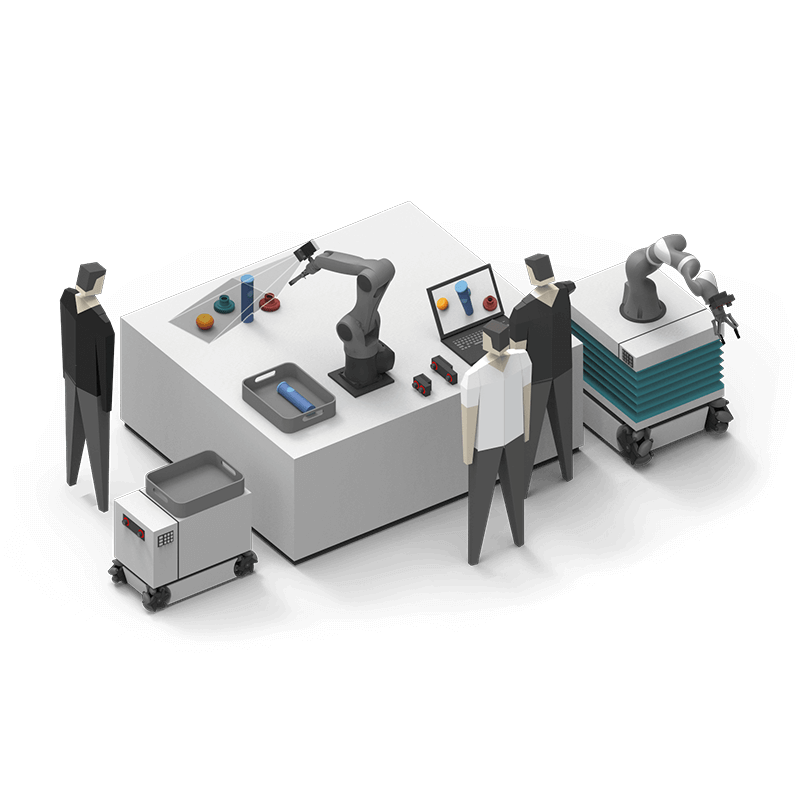
The rc_reason suite of software modules is an advanced AppliedAI solution designed for robotic applications:
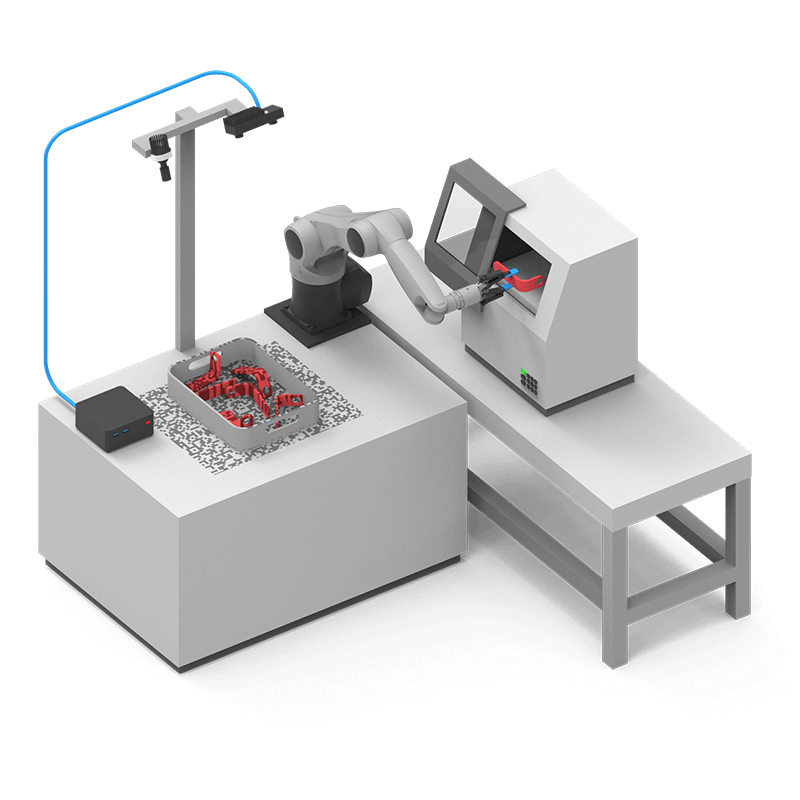
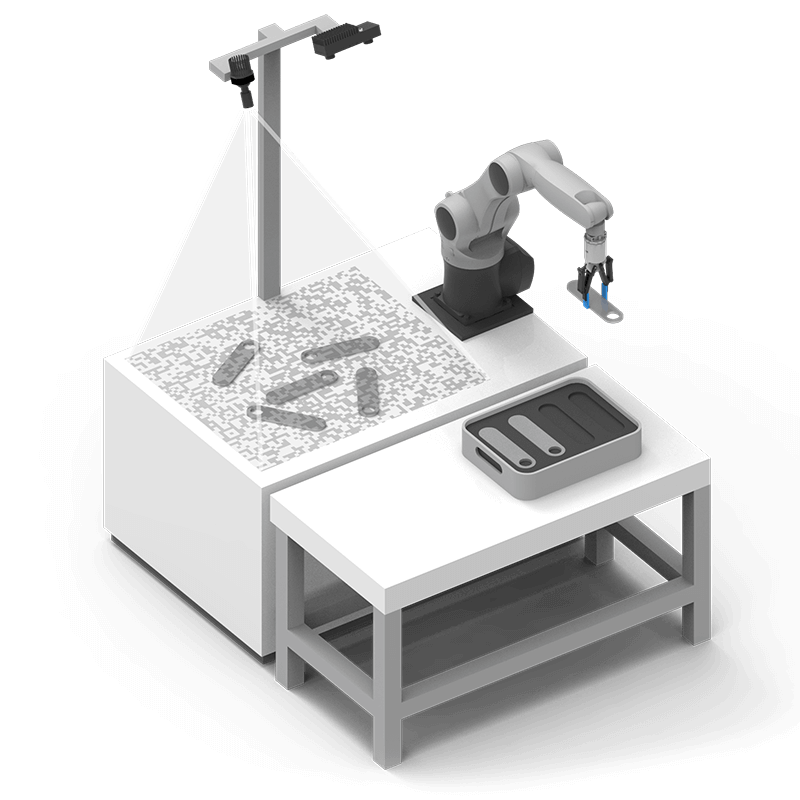
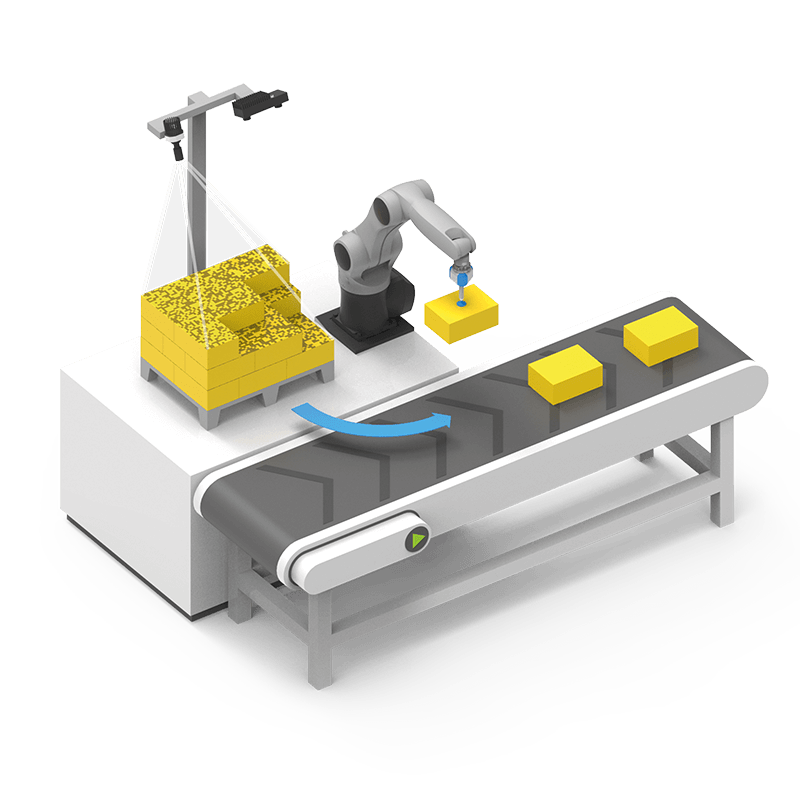
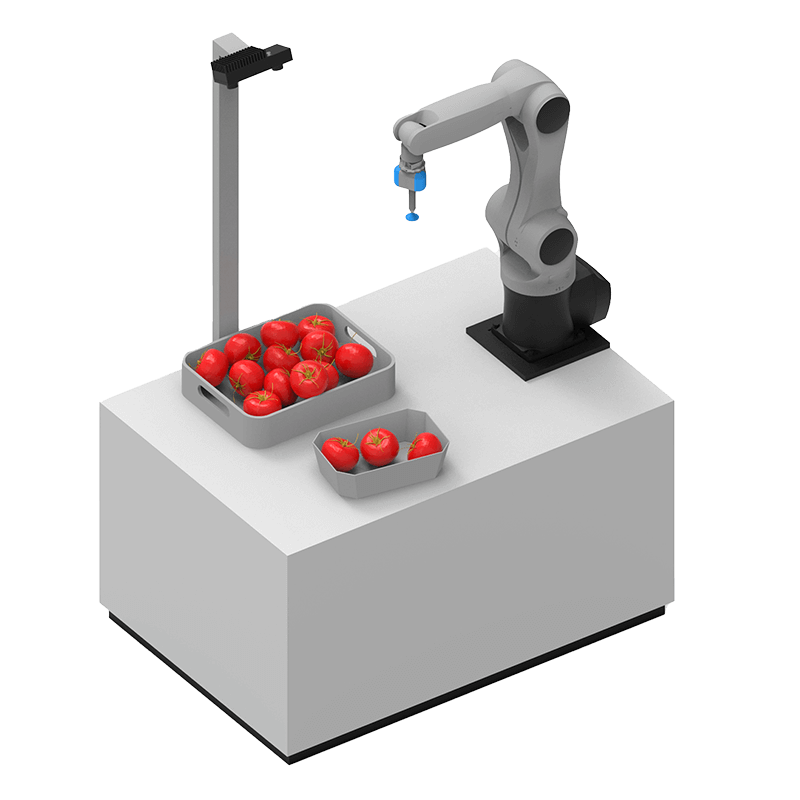
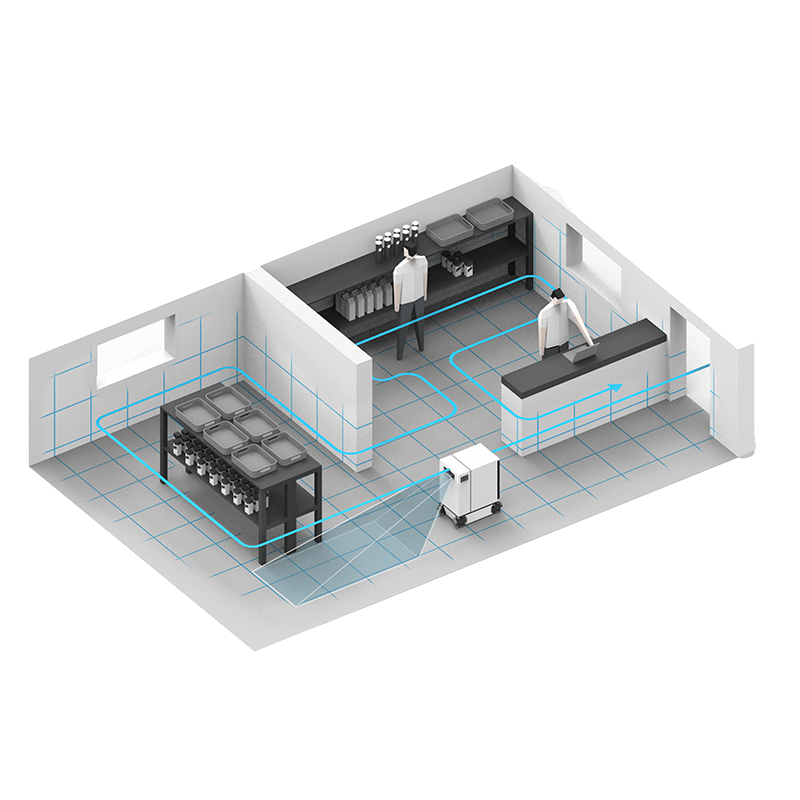
Users select the plug-and-produce software module that best meets their individual needs, and with a few mouse clicks, our 3D stereo products provide task-relevant information such as grasp points. A wide range of applications can be realized, from machine tending and order picking to (de-)palletizing.
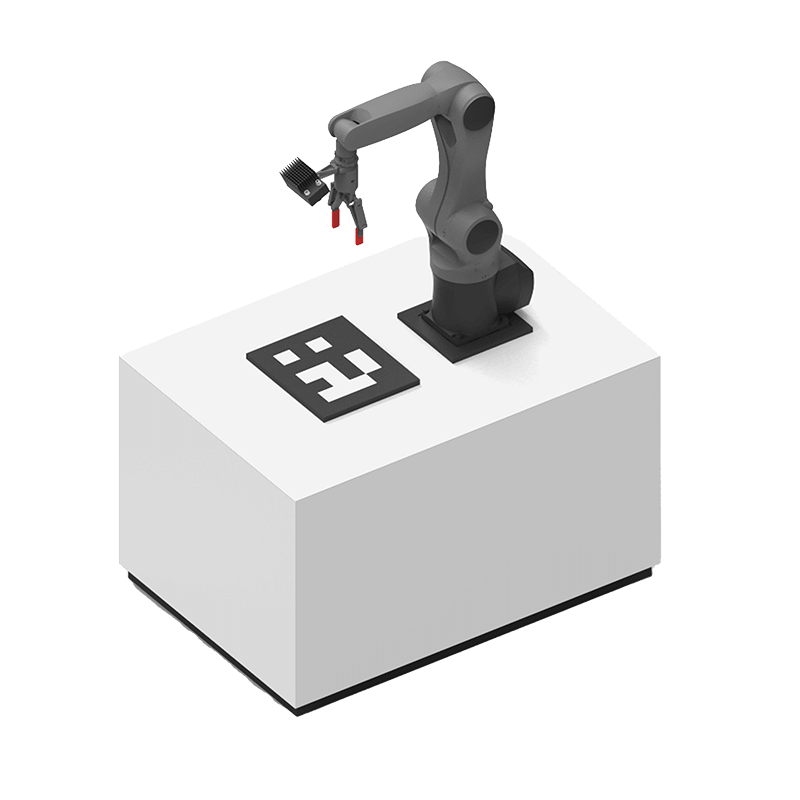
The basic software package of our intelligent sensors and platforms can be extended with selected elements from the modular rc_reason software suite to optimize the performance for specific robot applications. rc_reason components can be easily activated on any device and intuitively operated via the standard user interface.
Software Activation for Modules of the rc_reason Software Suite
If you purchase hardware and software separately, or if you wish to add software modules at a later date, you will receive an activation code from us at the time of purchase. You can activate this using the following link:
You would like to find out whether our portfolio is suitable for your robotic application? Simply request a feasibility study free of charge, and get a live demo of our products.
Would you like to try out one of our sensors and software solutions? Our Try-&-Buy-option gives you the chance to test our products before you decide, and to be sure you make the right choice for your application.