
Robot-Vision für die Maschinenbestückung
Wie das Hinzufügen einer Bildverarbeitungskomponente präzises Pick-und-Place für die automatisierte Maschinenbestückung mit über 100 verschiedenen Teilen ermöglicht

Der rc_visard 65 color ist für Anwendungen mit einem Betrachtungsabstand von typischerweise weniger als 50 cm optimiert, die eine Farbdifferenzierung erfordern. Durch seine kompakte Größe ist er besonders für die Montage am Roboterarm geeignet. Da der rc_visard 65 color die Fähigkeit zur Farbdifferenzierung besitzt, funktioniert er am besten bei guten Lichtverhältnissen.

Der rc_visard 65 monochrom ist für Anwendungen mit einem Betrachtungsabstand von typischerweise weniger als 50 cm optimiert, die keine Farbdifferenzierung erfordern. Durch seine kompakte Größe ist er besonders für die Montage am Roboterarm geeignet. Da seine Kameras dreimal lichtempfindlicher als Farbkameras sind, arbeitet er auch bei schlechten/variablen Lichtverhältnissen zuverlässig.

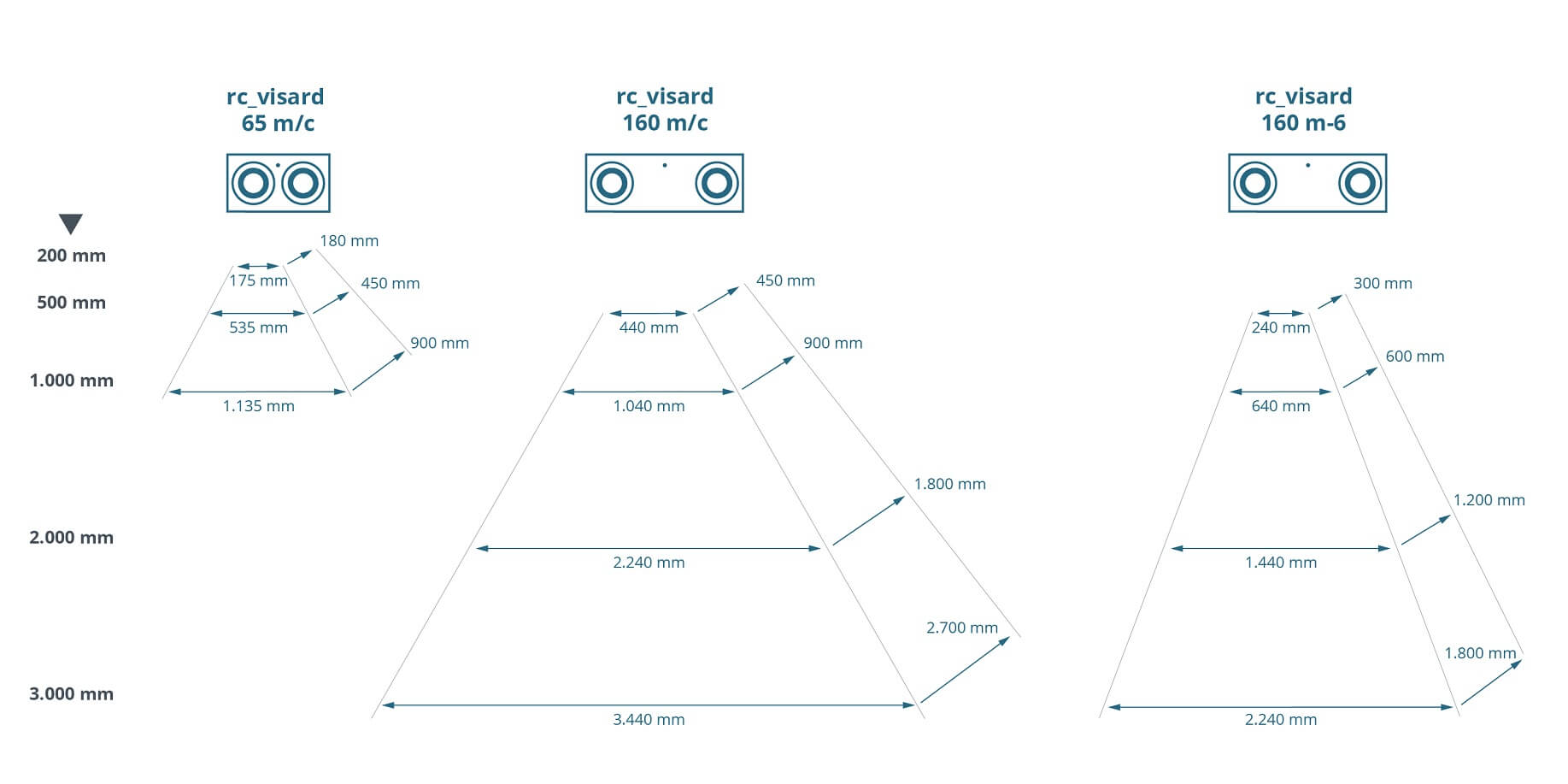
Der rc_visard 160 color ist für Anwendungen optimiert, die hohe Präzision bei größeren Arbeitsabständen erfordern. Er ist eine gute Wahl für die statische Montage über einer Szene sowie für mobile Robotikanwendungen, z. B. zur Navigation. Da der rc_visard 160 color über die Fähigkeit zur Farbdifferenzierung verfügt, funktioniert er am besten bei guten Lichtverhältnissen.

Der rc_visard 160 monochrom ist für Anwendungen mit einem Betrachtungsabstand von mehr als 50 cm optimiert, die keine Farbdifferenzierung erfordern. Der rc_visard 160 monochrom verwendet Kameras, die dreimal lichtempfindlicher als Farbkameras sind und daher auch bei schlechten/variablen Lichtverhältnissen zuverlässig arbeiten.
Der rc_visard 160 monochrom ist in zwei Varianten erhältlich.
Der rc_visard 65 color ist für Anwendungen mit einem Betrachtungsabstand von typischerweise weniger als 50 cm optimiert, die eine Farbdifferenzierung erfordern. Durch seine kompakte Größe ist er besonders für die Montage am Roboterarm geeignet. Da der rc_visard 65 color die Fähigkeit zur Farbdifferenzierung besitzt, funktioniert er am besten bei guten Lichtverhältnissen.
Der rc_visard 65 monochrom ist für Anwendungen mit einem Betrachtungsabstand von typischerweise weniger als 50 cm optimiert, die keine Farbdifferenzierung erfordern. Durch seine kompakte Größe ist er besonders für die Montage am Roboterarm geeignet. Da seine Kameras dreimal lichtempfindlicher als Farbkameras sind, arbeitet er auch bei schlechten/variablen Lichtverhältnissen zuverlässig.
Der rc_visard 160 color ist für Anwendungen optimiert, die hohe Präzision bei größeren Arbeitsabständen erfordern. Er ist eine gute Wahl für die statische Montage über einer Szene sowie für mobile Robotikanwendungen, z. B. zur Navigation. Da der rc_visard 160 color über die Fähigkeit zur Farbdifferenzierung verfügt, funktioniert er am besten bei guten Lichtverhältnissen.
Der rc_visard 160 monochrom ist für Anwendungen mit einem Betrachtungsabstand von mehr als 50 cm ohne Farbdifferenzierung optimiert. Es werden sehr lichtempfindliche Kameras verwendet, die auch bei schlechten/variablen Lichtverhältnissen zuverlässig arbeiten.
Der rc_visard 160 monochrom ist in zwei Varianten erhältlich: Mit einer Brennweite von 6 mm oder den üblichen 4 mm. Die größere Brennweite ermöglicht eine höhere Auflösung und Genauigkeit bei verringertem Sichtbereich.



 Der rc_visard kann zuverlässig im Innen- wie im Außenbereich eingesetzt werden.
Der rc_visard kann zuverlässig im Innen- wie im Außenbereich eingesetzt werden.
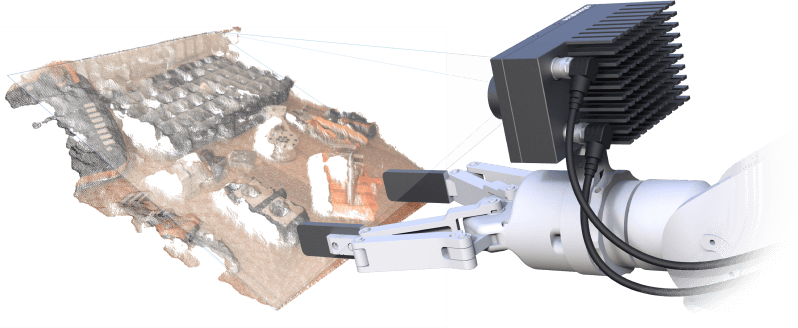
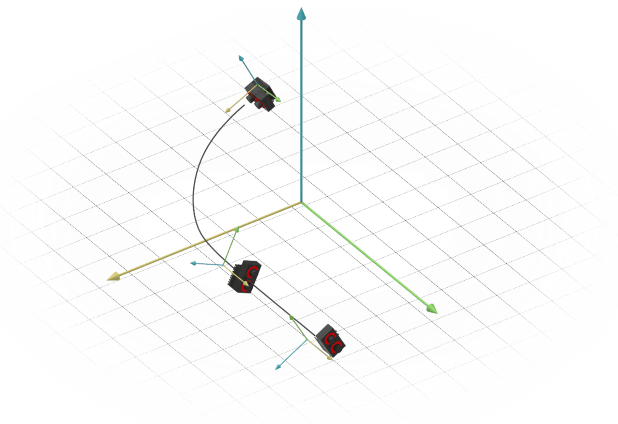
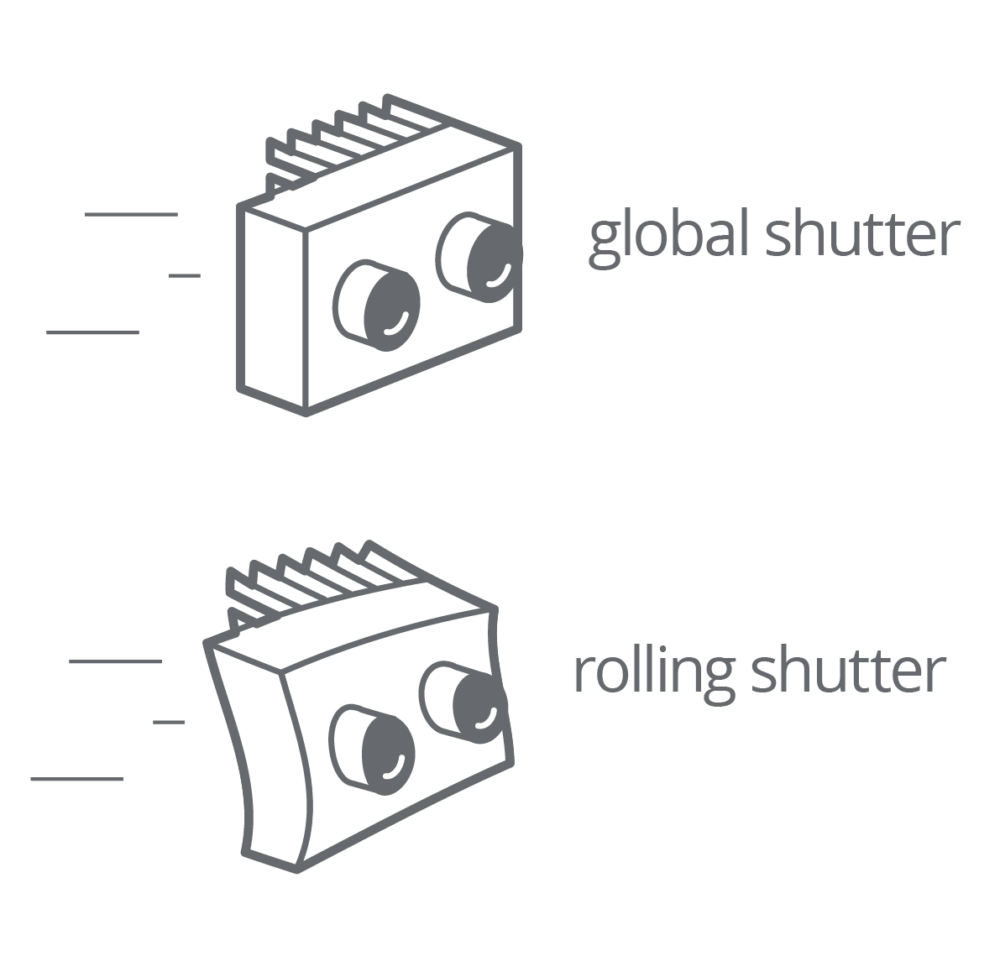 Präzise Bilddaten auch bei schnellen Bewegungen.
Präzise Bilddaten auch bei schnellen Bewegungen.
 Es können problemlos mehrere Sensoren störungsfrei auf engem Raum operieren.
Es können problemlos mehrere Sensoren störungsfrei auf engem Raum operieren.

_800x800")

Wie das Hinzufügen einer Bildverarbeitungskomponente präzises Pick-und-Place für die automatisierte Maschinenbestückung mit über 100 verschiedenen Teilen ermöglicht

Wie ein Vorserienprodukt zur Kernkomponente einer preisgekrönten Intralogistiklösung für automatisiertes Picken wurde

Präzise Lokalisierung mittels Roboterwahrnehmung unterstützt zuverlässige Laborautomation

Wie der Einsatz eines Bildverarbeitungssystems zu einer erhöhten Robustheit und einer um 50 % reduzierten Zykluszeit bei der Herstellung von feuerfesten Ziegeln führt